Grassmann.jl

![]()
![]()
![]()
![]()
![]()
![]()
![]()
The Grassmann.jl package provides tools for computations based on multi-linear algebra and spin groups using the extended geometric algebra known as Grassmann-Clifford-Hodge algebra.
Algebra operations include exterior, regressive, inner, and geometric, along with the Hodge star and boundary operators.
Code generation enables concise usage of the algebra syntax.
DirectSum.jl multivector parametric type polymorphism is based on tangent vector spaces and conformal projective geometry.
Additionally, the universal interoperability between different sub-algebras is enabled by AbstractTensors.jl, on which the type system is built.
The design is based on TensorAlgebra{V} abstract type interoperability from AbstractTensors.jl with a K-module type parameter V from DirectSum.jl.
Abstract vector space type operations happen at compile-time, resulting in a differential geometric algebra of multivectors.
![]()



____ ____ ____ _____ _____ ___ ___ ____ ____ ____
/ T| \ / T / ___/ / ___/| T T / T| \ | \
Y __j| D )Y o |( \_ ( \_ | _ _ |Y o || _ Y| _ Y
| T || / | | \__ T \__ T| \_/ || || | || | |
| l_ || \ | _ | / \ | / \ || | || _ || | || | |
| || . Y| | | \ | \ || | || | || | || | |
l___,_jl__j\_jl__j__j \___j \___jl___j___jl__j__jl__j__jl__j__j
- Michael Reed, Principal Differential Geometric Algebra: compute using Grassmann.jl, Cartan.jl (Hardcover, 2025)
- Michael Reed, Principal Differential Geometric Algebra: compute using Grassmann.jl, Cartan.jl (Paperback, 2025)
Please consider donating to show your thanks and appreciation to this project at liberapay, GitHub Sponsors, Patreon, or contribute (documentation, tests, examples) in the repositories.
- Requirements
- DirectSum.jl parametric type polymorphism
- Grassmann.jl API design overview
- Visualization examples
- References
TensorAlgebra{V} design and code generation
Mathematical foundations and definitions specific to the Grassmann.jl implementation provide an extensible platform for computing with a universal language for finite element methods based on a discrete manifold bundle. Tools built on these foundations enable computations based on multi-linear algebra and spin groups using the geometric algebra known as Grassmann algebra or Clifford algebra. This foundation is built on a DirectSum.jl parametric type system for tangent bundles and vector spaces generating the algorithms for local tangent algebras in a global context. With this unifying mathematical foundation, it is possible to improve efficiency of multi-disciplinary research using geometric tensor calculus by relying on universal mathematical principles.
- AbstractTensors.jl: Tensor algebra abstract type interoperability setup
- DirectSum.jl: Tangent bundle, vector space and
Submanifolddefinition - Grassmann.jl: ⟨Grassmann-Clifford-Hodge⟩ multilinear differential geometric algebra
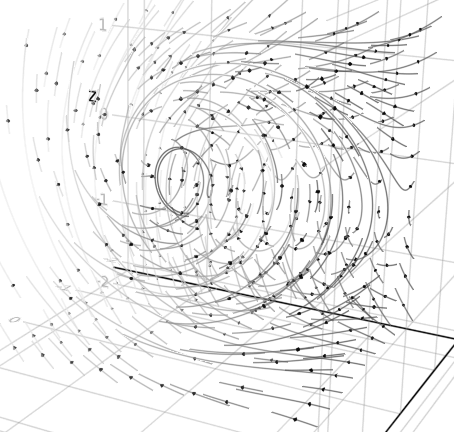
using Grassmann, Makie; @basis S"∞+++"
streamplot(vectorfield(exp((π/4)*(v12+v∞3)),V(2,3,4),V(1,2,3)),-1.5..1.5,-1.5..1.5,-1.5..1.5,gridsize=(10,10))
More information and tutorials are available at https://grassmann.crucialflow.com/dev
Requirements
Grassmann.jl is a package for the Julia language, which can be obtained from their website or the recommended method for your operating system (GNU/Linux/Mac/Windows). Go to docs.julialang.org for documentation.
Availability of this package and its subpackages can be automatically handled with the Julia package manager using Pkg; Pkg.add("Grassmann") or
pkg> add Grassmann
If you would like to keep up to date with the latest commits, instead use
pkg> add Grassmann#master
which is not recommended if you want to use a stable release.
When the master branch is used it is possible that some of the dependencies also require a development branch before the release. This may include, but not limited to:
This requires a merged version of ComputedFieldTypes at https://github.com/vtjnash/ComputedFieldTypes.jl
Interoperability of TensorAlgebra with other packages is enabled by DirectSum.jl and AbstractTensors.jl.
The package is compatible via Requires.jl with Reduce.jl, Symbolics.jl, SymPy.jl, SymEngine.jl, AbstractAlgebra.jl, GaloisFields.jl, LightGraphs.jl, UnicodePlots.jl, Makie.jl, GeometryBasics.jl, Meshes.jl,
Sponsor this at liberapay, GitHub Sponsors, Patreon, or Lulu.
DirectSum.jl parametric type polymorphism
The AbstractTensors package is intended for universal interoperation of the abstract TensorAlgebra type system.
All TensorAlgebra{V} subtypes have type parameter V, used to store a Submanifold{M} value, which is parametrized by M the TensorBundle choice.
This means that different tensor types can have a commonly shared underlying K-module parametric type expressed by defining V::Submanifold{M}.
Each TensorAlgebra subtype must be accompanied by a corresponding TensorBundle parameter, which is fully static at compile time.
Due to the parametric type system for the K-module types, the compiler can fully pre-allocate and often cache.
Let V be a K-module of rank n be specified by instance with the tuple (n,P,g,ν,μ) with P specifying the presence of the projective basis and g is a metric tensor specification.
The type TensorBundle{n,P,g,ν,μ} encodes this information as byte-encoded data available at pre-compilation,
where μ is an integer specifying the order of the tangent bundle (i.e. multiplicity limit of the Leibniz-Taylor monomials).
Lastly, ν is the number of tangent variables, bases for the vectors and covectors; and bases for differential operators and scalar functions.
The purpose of the TensorBundle type is to specify the K-module basis at compile time.
When assigned in a workspace, V = Submanifold(::TensorBundle).
The metric signature of the Submanifold{V,1} elements of a vector space V can be specified with the V"..." by using + or - to specify whether the Submanifold{V,1} element of the corresponding index squares to +1 or -1.
For example, S"+++" constructs a positive definite 3-dimensional TensorBundle, so constructors such as S"..." and D"..." are convenient.
It is also possible to change the diagonal scaling, such as with D"1,1,1,0", although the Signature format has a more compact representation if limited to +1 and -1.
It is also possible to change the diagonal scaling, such as with D"0.3,2.4,1".
Fully general MetricTensor as a type with non-diagonal components requires a matrix, e.g. MetricTensor([1 2; 2 3]).
Declaring an additional point at infinity is done by specifying it in the string constructor with ∞ at the first index (i.e. Riemann sphere S"∞+++").
The hyperbolic geometry can be declared by ∅ subsequently (i.e. hyperbolic projection S"∅+++").
Additionally, the null-basis based on the projective split for conformal geometric algebra would be specified with S"∞∅+++".
These two declared basis elements are interpreted in the type system.
The tangent(V,μ,ν) map can be used to specify μ and ν.
To assign V = Submanifold(::TensorBundle) along with associated basis
elements of the DirectSum.Basis to the local Julia session workspace, it is typical to use Submanifold elements created by the @basis macro,
julia> using Grassmann; @basis S"-++" # macro or basis"-++"
(⟨-++⟩, v, v₁, v₂, v₃, v₁₂, v₁₃, v₂₃, v₁₂₃)
the macro @basis V delcares a local basis in Julia.
As a result of this macro, all Submanifold{V,G} elements generated with M::TensorBundle become available in the local workspace with the specified naming arguments.
The first argument provides signature specifications, the second argument is the variable name for V the K-module, and the third and fourth argument are prefixes of the Submanifold vector names (and covector names).
Default is V assigned Submanifold{M} and v is prefix for the Submanifold{V}.
It is entirely possible to assign multiple different bases having different signatures without any problems.
The @basis macro arguments are used to assign the vector space name to V and the basis elements to v..., but other assigned names can be chosen so that their local names don’t interfere:
If it is undesirable to assign these variables to a local workspace, the versatile constructs of DirectSum.Basis{V} can be used to contain or access them, which is exported to the user as the method DirectSum.Basis(V).
julia> DirectSum.Basis(V)
DirectSum.Basis{⟨-++⟩,8}(v, v₁, v₂, v₃, v₁₂, v₁₃, v₂₃, v₁₂₃)
V(::Int...) provides a convenient way to define a Submanifold by using integer indices to reference specific direct sums within ambient V.
Additionally, a universal unit volume element can be specified in terms of LinearAlgebra.UniformScaling, which is independent of V and has its interpretation only instantiated by context of TensorAlgebra{V} elements being operated on.
Interoperability of LinearAlgebra.UniformScaling as a pseudoscalar element which takes on the TensorBundle form of any other TensorAlgebra element is handled globally.
This enables the usage of I from LinearAlgebra as a universal pseudoscalar element defined at every point x of a manifold, which is mathematically denoted by I = I(x) and specified by the g(x) bilinear tensor field.
Grassmann.jl API design overview
Grassmann.jl is a foundation which has been built up from a minimal K-module algebra kernel on which an entirely custom algbera specification is designed and built from scratch on the base Julia language.
Definition.
TensorAlgebra{V,K} where V::Submanifold{M} for a generating K-module specified by a M::TensorBundle choice
TensorBundlespecifies generators ofDirectSum.BasisalgebraIntvalue induces a Euclidean metric of counted dimensionSignatureusesS"..."with + and - specifying the metricDiagonalFormusesD"..."for defining any diagonal metricMetricTensorcan accept non-diagonal metric tensor array
TensorGraded{V,G,K}has gradeGelement of exterior algebraChain{V,G,K}has a complete basis for gradeGwithK-moduleSimplex{V}alias column-moduleChain{V,1,Chain{V,1,K}}
TensorTerm{V,G,K} <: TensorGraded{V,G,K}single coefficientZero{V}is a zero value which preservesVin its algebra typeSubmanifold{V,G,B}is a gradeGbasis with sorted indicesBSingle{V,G,B,K}whereB::Submanifold{V}is paired toK
AbstractSpinor{V,K}subtypes are special Clifford sub-algebrasCouple{V,B,K}is the sum ofKscalar withSingle{V,G,B,K}PseudoCouple{V,B,K}is pseudoscalar +Single{V,G,B,K}Spinor{V,K}has complete basis for theevenZ2-graded termsCoSpinor{V,K}has complete basis foroddZ2-graded terms
Multivector{V,K}has complete exterior algebra basis withK-module
Definition. TensorNested{V,T} subtypes are linear transformations
TensorOperator{V,W,T}linear operator mapping withT::DataTypeEndomorphism{V,T}linear endomorphism map withT::DataType
DiagonalOperator{V,T}diagonal endomorphism withT::DataTypeDiagonalMorphism{V,<:Chain{V,1}}diagonal map on grade 1 vectorsDiagonalOutermorphism{V,<:Multivector{V}}on full exterior algebra
Outermorphism{V,T}extendsEndomorphism{V}to full exterior algebraProjector{V,T}linear map withF(F) = FdefinedDyadic{V,X,Y}linear map withDyadic(x,y)=x ⊗ y
Grassmann.jl was first to define a comprehensive TensorAlgebra{V} type system from scratch around the idea of the V::Submanifold{M} value to express algebra subtypes for a specified K-module structure.
Definition. Common unary operations on TensorAlgebra elements
Manifoldreturns the parameterV::Submanifold{M}K-modulemdimsdimensionality of the pseudoscalarVof thatTensorAlgebragdimsdimensionality of the gradeGofVfor thatTensorAlgebratdimsdimensionality ofMultivector{V}for thatTensorAlgebragradereturnsGforTensorGraded{V,G}whilegrade(x,g)is selectionistensorreturns true forTensorAlgebraelementsisgradedreturns true forTensorGradedelementsistermreturns true forTensorTermelementscomplementrightEuclidean metric Grassmann right complementcomplementleftEuclidean metric Grassmann left complementcomplementrighthodgeGrassmann-Hodge right complementreverse(x)*IcomplementlefthodgeGrassmann-Hodge left complementI*reverse(x)metricapplies themetricextensoras outermorphism operatorcometricapplies complementmetricextensoras outermorphismmetrictensorreturnsgbilinear form associated toTensorAlgebra{V}metrictextensorreturns outermorphism form forTensorAlgebra{V}involutegrade permutes basis perkwithgrade(x,k)*(-1)^kreversepermutes basis perkwithgrade(x,k)*(-1)^(k(k-1)/2)cliffordconjugate of an element is compositeinvolute ∘ reverseevenpart selects(x + involute(x))/2and is defined by even gradeoddpart selects(x - involute(x))/2and is defined by odd graderealpart selects(x + reverse(x))/2and is defined by positive squareimagpart selects(x - reverse(x))/2and is defined by negative squareabsis the absolute valuesqrt(reverse(x)*x)andabs2is thenreverse(x)*xnormevaluates a positive definite norm metric on the coefficientsunitapplies normalization defined asunit(t) = t/abs(t)scalarselects grade 0 term of anyTensorAlgebraelementvectorselects grade 1 terms of anyTensorAlgebraelementbivectorselects grade 2 terms of anyTensorAlgebraelementtrivectorselects grade 3 terms of anyTensorAlgebraelementpseudoscalarmax. grade term of anyTensorAlgebraelementvaluereturns internalValuestuple of aTensorAlgebraelementvaluetypereturns type of aTensorAlgebraelement value’s tuple
Binary operations commonly used in Grassmann algebra syntax
+and-carry over from theK-module structure associated toKwedgeis exterior product∧andveeis regressive product∨>is the right contraction and<is the left contraction of the algebra*is the geometric product and/usesinvalgorithm for division⊘is thesandwichand>>>is its alternate operator orientation
Custom methods related to tensor operators and roots of polynomials
invreturns the inverse andadjugatereturns transposed cofactordetreturns the scalar determinant of an endomorphism operatortrreturns the scalar trace of an endomorphism operatortransposeoperator has swapping of row and column indicescompound(F,g)is the graded multilinearEndomorphismoutermorphism(A)transformsEndomorphismintoOutermorphismoperatormake linear representation of multivector outermorphismcompanionmatrix of monic polynomiala0 + a1*z + ... + an*z^n + z^(n+1)roots(a...)of polynomial with coefficientsa0 + a1*z + ... + an*z^nrootsrealof polynomial with coefficientsa0 + a1*z + ... + an*z^nrootscomplexof polynomial with coefficientsa0 + a1*z + ... + an*z^nmonicroots(a...)of monic polynomiala0 + a1*z + ... + an*z^n + z^(n+1)monicrootsrealof monic polynomiala0 + a1*z + ... + an*z^n + z^(n+1)monicrootscomplexof monic polynomiala0 + a1*z + ... + an*z^n + z^(n+1)characteristic(A)polynomial coefficients fromdet(A-λ*I)eigvals(A)are the eigenvalues[λ1,...,λn]so thatA*ei = λi*eieigvalsrealare real eigenvalues[λ1,...,λn]so thatA*ei = λi*eieigvalscomplexare complex eigenvalues[λ1,...,λn]soA*ei = λi*eieigvecs(A)are the eigenvectors[e1,...,en]so thatA*ei = λi*eieigvecsrealare real eigenvectors[e1,...,en]so thatA*ei = λi*eieigvecscomplexare complex eigenvectors[e1,...,en]soA*ei = λi*eieigen(A)spectral decomposition sum ofλi*Proj(ei)withA*ei = λi*eieigenrealspectral decomposition sum ofλi*Proj(ei)withA*ei = λi*eieigencomplexspectral decomposition sum ofλi*Proj(ei)soA*ei = λi*eieigpolys(A)normalized symmetrized functions ofeigvals(A)eigpolys(A,g)normalized symmetrized function ofeigvals(A)vandermondefacilitates(inv(X'X)*X')*yfor polynomial coefficientscayley(V,∘)returns product table forVand binary operation∘
Accessing metrictensor(V) produces a linear map g which can be extended to an outermorphism given by metricextensor.
To apply the metricextensor to any Grassmann element, the function metric can be used on the element, cometric applies a complement metric.
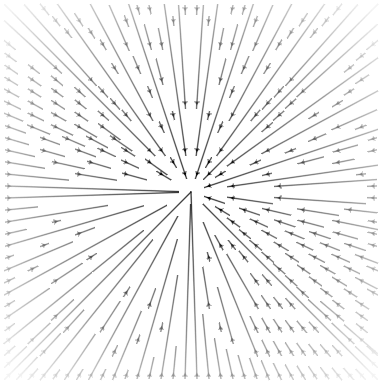
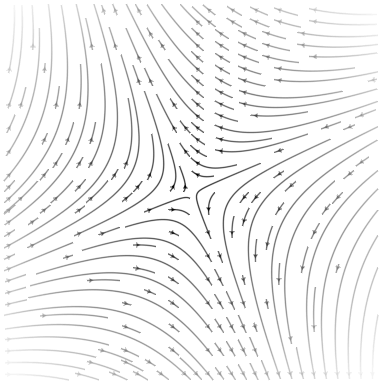
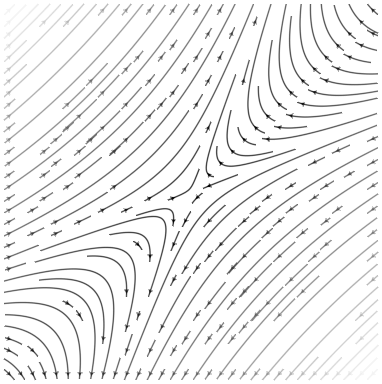
Visualization examples
Due to GeometryBasics.jl Point interoperability, plotting and visualizing with Makie.jl is easily possible. For example, the vectorfield method creates an anonymous Point function that applies a versor outermorphism:
using Grassmann, Makie
basis"2" # Euclidean
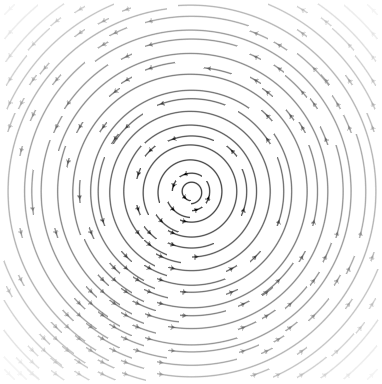
streamplot(vectorfield(exp(π*v12/2)),-1.5..1.5,-1.5..1.5)
streamplot(vectorfield(exp((π/2)*v12/2)),-1.5..1.5,-1.5..1.5)
streamplot(vectorfield(exp((π/4)*v12/2)),-1.5..1.5,-1.5..1.5)
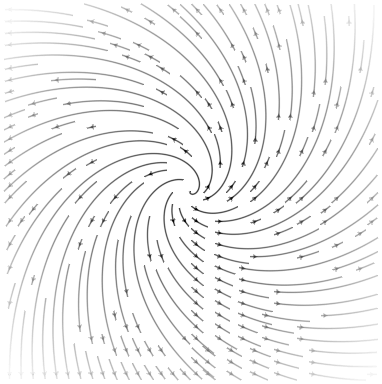
streamplot(vectorfield(v1*exp((π/4)*v12/2)),-1.5..1.5,-1.5..1.5)
@basis S"+-" # Hyperbolic
streamplot(vectorfield(exp((π/8)*v12/2)),-1.5..1.5,-1.5..1.5)
streamplot(vectorfield(v1*exp((π/4)*v12/2)),-1.5..1.5,-1.5..1.5)

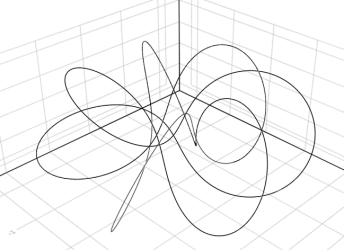
using Grassmann, Makie
@basis S"∞+++"
f(t) = (↓(exp(π*t*((3/7)*v12+v∞3))>>>↑(v1+v2+v3)))
lines(V(2,3,4).(points(f)))
@basis S"∞∅+++"
f(t) = (↓(exp(π*t*((3/7)*v12+v∞3))>>>↑(v1+v2+v3)))
lines(V(3,4,5).(points(f)))
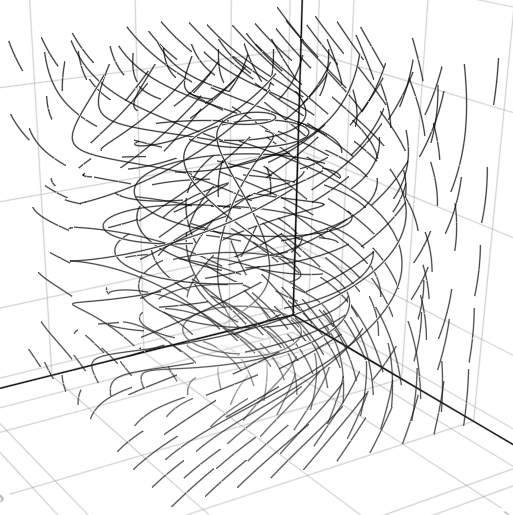
using Grassmann, Makie; @basis S"∞+++"
streamplot(vectorfield(exp((π/4)*(v12+v∞3)),V(2,3,4)),-1.5..1.5,-1.5..1.5,-1.5..1.5,gridsize=(10,10))
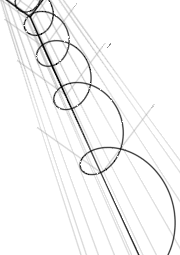
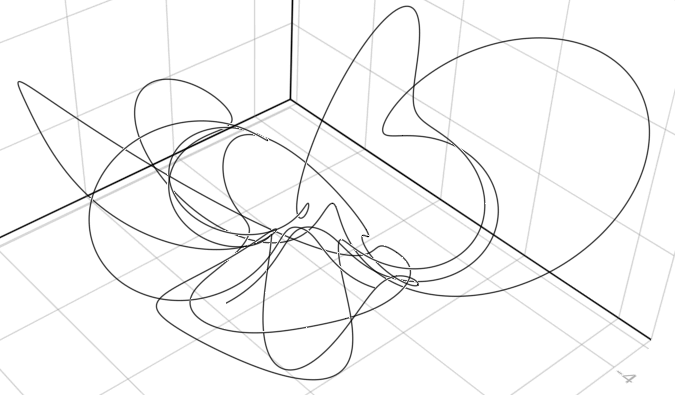
using Grassmann, Makie; @basis S"∞+++"
f(t) = ↓(exp(t*v∞*(sin(3t)*3v1+cos(2t)*7v2-sin(5t)*4v3)/2)>>>↑(v1+v2-v3))
lines(V(2,3,4).(points(f)))
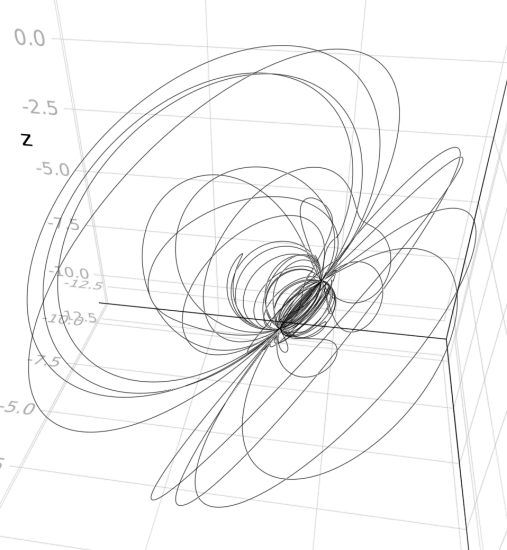
using Grassmann, Makie; @basis S"∞+++"
f(t) = ↓(exp(t*(v12+0.07v∞*(sin(3t)*3v1+cos(2t)*7v2-sin(5t)*4v3)/2))>>>↑(v1+v2-v3))
lines(V(2,3,4).(points(f)))
References
- Michael Reed, Differential geometric algebra with Leibniz and Grassmann, JuliaCon (2019)
- Michael Reed, Foundations of differential geometric algebra (2021)
- Michael Reed, Multilinear Lie bracket recursion formula (2024)
- Michael Reed, Differential geometric algebra: compute using Grassmann.jl and Cartan.jl (2025)
- Michael Reed, Principal Differential Geometric Algebra: compute using Grassmann.jl, Cartan.jl (Hardcover, 2025)
- Michael Reed, Principal Differential Geometric Algebra: compute using Grassmann.jl, Cartan.jl (Paperback, 2025)