Grassmann elements and geometric algebra Λ(V)
Definition (Vector space $\Lambda^1 V = V$ is a field's $\mathbb K$-module). Let $V$ be a $\mathbb K$-module (abelian group with respect to $+$) with an element $1\in\mathbb K$ such that $1V = V$ by scalar multiplication $\otimes:\mathbb K\times V\rightarrow V$ over field $\mathbb K$ satisfying
- $a\otimes(x+y) = a\otimes x+ a\otimes y$ is distribution of vector addition,
- $(a+b)\otimes x = a\otimes x + b\otimes d$ is distribution of field addition,
- $(ab)\otimes x = a\otimes (b\otimes x)$ is multiplicative associative compatibility.
In the software package Grassmann, a
generating vector space $\mathbb{K}$-module is
specified as a value of <:TensorBundle (an
abstract type).
A vector space has addition $+$ and a multiplication operation $\cdot$ or $\otimes$,
- Let $x,y\in V$, then vector addition $x+y\in V$ exists.
- Let $x,y\in V$, then vector addition $x+y = y+x$ is commutative.
- Let $x,y,z\in V$, then $(x+y)+z = x+(y+z)$ is associative.
- Let $x\in V$, then additive $0\in V$ existst such that $x+0=x$.
- Let $x\in V$, then negation $-x\in V$ exists such that $x+(-x)=0$.
- Let $x\in V$, then multiplicative $1\in\mathbb K$ exists so that $1\otimes x = x\otimes 1 = x$.
- Let $a\in\mathbb K$ and $x\in V$, then scalar multiple $a\otimes x=x\otimes a\in V$ exists.
- Let $a\in\mathbb K$ and $x,y\in V$, then $a\otimes (x+y) = a\otimes x+a\otimes y$ distributes.
- Let $a,b\in\mathbb K$ and $x\in V$, then $(a+b)\otimes x = a\otimes x + b\otimes x$ distributes.
- Let $a,b\in\mathbb K$ and $x\in V$, then $a\otimes(b\otimes x) = (ab)\otimes x$ is $\mathbb K$-compatible.
The StaticVectors package has been custom
made for the Grassmann project specifically to
serve as its $\mathbb K$-module foundation,
used as underlying type for constructing algebra elements
with additional contextual metadata.
julia> using StaticVectors
julia> Values(1,2,3) + Values(2,3,4)
3-element Values{3, Int64} with indices SOneTo(3):
3
5
7In geometric algebra contexts, it is desirable to inherit the properties of a $\mathbb K$-module and then extend its algebra with more operations by having the context introduced from additional metadata associated to the $\mathbb K$-module. The additional algebra operations would become ambiguous and difficult to express without attaching desirable metadata to the objects and types.
As a comprehensive project to create a more robust and
standard type system specification for geometric algebra
purposes, the TensorAlgebra{V} type system has
been custom designed and pioneered in such a way that type
information associated to V provides the
necessary background information to compile computer
algebra code by context of the object types.
Definition (Linear dependence). Let $V$ be a vector space over field $\mathbb K$, then the set $\{v_i\}_i$ is linearly dependent if and only if $\sum_{i=1}^n k_iv_i = 0$ for some $0\ne k\in\mathbb K^n$.
Axiom. Let $V$ be a
$\mathbb K$-module,
TensorAlgebra{V} has tensor products
- Let $a\in\mathbb K$ and $x,y\in V$, then $a\otimes(x\otimes y) = (a\otimes x)\otimes y = x\otimes(a\otimes y)$.
Axiom (Exterior algebra). Associative tensors with exterior products $\wedge \subset \otimes$ of vectors having anti-symmetric negation applied distributively:
- Let $x,y\in V$, then $x\wedge y = -y\wedge x$ is Grassmann's exterior product.
- Let $x,y,z\in V$, then $(x\wedge y)\wedge z = x\wedge(y\wedge z)$ is associative.
- Let $x,y,z\in V$, then $x\wedge (y+z) = x\wedge y + x\wedge z$ is distributive.
Notation: let $x,y,z\in V=\Lambda^1V$, then $x\wedge y \in\Lambda^2 V$ and $x\wedge y\wedge z\in\Lambda^3 V$, etc.
Theorem ($\wedge$-product annihilation). For a linearly dependent set $\{v_i\}_1^n\subset V$
\[v_1\wedge v_2\wedge\dots\wedge v_n = 0.\]
Proof. Initially, it is enough to understand that $\wedge:\Lambda^n V\times\Lambda^m V\rightarrow\Lambda^{n+m}V$ is an operation which is zero for linearly dependent arguments. However, this idea occurs from extending Grassmann's product $v_i\wedge v_j = -v_j\wedge v_i \implies v_i\wedge v_i = 0 = -v_i\wedge v_i$ to yield a tool for characterizing linear dependence. For example, observe that $k_1v_i+k_2v_i = 0$ is linearly dependent with $k_1=-k_2$ and $v_i\wedge v_i=0$.
Corollary (Dimension
$n$-Submanifold in $\Lambda^n
V$). Note that writing the product $v_1\wedge
v_2\wedge\cdots\wedge v_n\ne0$ implies a linearly
independent set $\{v_i\}_1^n\subseteq V$
isomorphic to an $n$-Submanifold
with $\mathbb{K}\times\{v_1\wedge
v_2\wedge\cdots\wedge v_n\}\cong\mathbb{K}$ being
the $1$-dimensional basis subspace which
scales any $n$-Submanifold.
Example. Therefore, $\mathbb K = \Lambda^0\mathbb K \cong \Lambda^1\mathbb K$ is a vector space or a 0-Submanifold.
Example. $\Lambda^n V$ is a vector space with $\Lambda^1\Lambda^n V = \Lambda^nV$ and $\Lambda^0\Lambda^nV = \Lambda^0V$.
Definition (Direct sum $\oplus$). Let $\pi_i:V\rightarrow V_i$ be projections with vector space $V_i\subset V$, if for every $k\in V\backslash\{0\}$ there exist $v_1\wedge\dots\wedge v_n\ne$ such that
\[k = \sum_{i=1}^n\pi_i(k) = \sum_{i=1}^n k_i \pi_i(v_i) = \sum_{i=1}^nk_iv_i, \qquad \pi_i(v_j) = \begin{cases} v_j, & i = j, \\ 0, & i\ne j, \end{cases}\]
then direct sum $V_1\oplus V_2\oplus\cdots\oplus V_n = V$ has a linear span basis $v_1\wedge\dots\wedge v_n\ne 0$.
Ddefinition Grade-$m$
projection grade(x,m) is defined as
$\langle\Lambda V\,\rangle_m = \Lambda^m V$
such that
\[\Lambda V = \bigoplus_{m=0}^n \langle\Lambda V\,\rangle_m = \Lambda^0V\oplus\Lambda^1V\oplus\cdots\oplus\Lambda^nV, \qquad \langle\Lambda V\,\rangle_m = \bigoplus_{m=1}^{n\choose m}\mathbb K.\]
Binomial $\dim \langle\Lambda V\,\rangle_m = {n\choose m}$ and hence $\dim\Lambda V = \sum_{m=0}^n {n\choose m} = 2^n$.
Example. Let $\sigma\in S_n$ and $v_i,v_j\in V$, then $v_i\wedge v_j = \varepsilon(\sigma)v_{\sigma(i)}\wedge v_{\sigma(j)}$,
\[v_{i_1}\wedge\cdots\wedge v_{i_g} = \varepsilon(\sigma)v_{\sigma(i_1)}\wedge\cdots\wedge v_{\sigma(i_{g})}, \quad v_{i_1},\dots,v_{i_g}\in V.\]
Changing the ordering of an exterior product is an oriented permutation:
\[ u(i_1,\dots,i_g) = \{\varepsilon(\sigma)v_{\sigma(i_1)}\wedge\cdots\wedge v_{\sigma(i_g)} \mid \sigma\in S_n\},\]
\[ u(1,2) = \{(-1)^0v_1\wedge v_2, (-1)^1v_2\wedge v_1\},\]
\[ u(1,3) = \{(-1)^0v_1\wedge v_3, (-1)^1v_3\wedge v_1\},\]
\[ u(2,3) = \{(-1)^0v_2\wedge v_3, (-1)^1v_3\wedge v_2\},\]
\[ u(1,2,3) = \{(-1)^0v_1\wedge v_2\wedge v_3,(-1)^1v_1\wedge v_3\wedge v_2, (-1)^1v_2\wedge v_1\wedge v_3,\]
\[ \quad\quad (-1)^2v_2\wedge v_3\wedge v_1, (-1)^2v_3\wedge v_1\wedge v_2,(-1)^3v_3\wedge v_2\wedge v_1 \}.\]
Elements of $u(i_1,\dots,i_g)$ are all equivalent, making it a singleton set. Since there is a whole permutation group for possible expressions with equivalent exterior product, it is helpful to pick a choice making algebraic expressions standard. Most convenient is to use ordering $i_1<\cdots<i_g$ as the canonical choice for product expressions with ordinal indices $i_1,\dots,i_g\in\{1,\dots,n\}$.
Example (Combinatorics of power set $\mathcal P(V)$). Let $v_1,v_2,v_3 \in\mathbb R^3$, then the power set of elements has $\operatorname{dim}\langle\Lambda V\rangle_m = {n\choose m} = \frac{n!}{m!(n-m)}$ binomial,
\[\mathcal P(\mathbb R^3) = \{\emptyset,\{v_1\},\{v_2\},\{v_3\},\{v_1,v_2\},\{v_1,v_3\},\{v_2,v_3\},\{v_1,v_2,v_3\}\}\]
Form a direct sum over the elements of $\mathcal P(V)$ with $\wedge$ to define $\Lambda V$, e.g.
\[\Lambda(\mathbb R^3) = \Lambda^0(\mathbb R^3)\oplus\Lambda^1(\mathbb R^3)\oplus\Lambda^2(\mathbb R^3)\oplus\Lambda^3(\mathbb R^3)\]
\[\overbrace{v_\emptyset}^{\Lambda^0\mathbb R}\oplus \overbrace{v_1\oplus v_2\oplus v_3}^{\Lambda^1(\mathbb R^3)}\oplus\overbrace{(v_1\wedge v_2)\oplus (v_1\wedge v_3) \oplus (v_2\wedge v_3)}^{\Lambda^2(\mathbb R^3)}\oplus\overbrace{(v_1\wedge v_2\wedge v_3)}^{\Lambda^3(\mathbb R^3)}\]
The Grassmann Submanifold elements
$v_k\in\Lambda^1V$ and
$w^k\in\Lambda^1V'$ are linearly independent
vector and covector elements of $V$, while the
Leibniz Operator elements $\partial_k\in
L^1V$ are partial tangent derivations and
$\epsilon_k\in L^1V'$ are dependent functions
of the tangent manifold. Let
$V\in\text{Vect}_{\mathbb k}$ be a
TensorBundle with dual space $V'$
and the basis elements $w_k:V\rightarrow\mathbb
K$, then for all $x\in V,c\in\mathbb K$
it holds: $(w^i+w^j)(x) = w^i(x)+w^j(x)$ and
$(cw^k)(x) = cw^k(x)$ hold. An element of a
mixed-symmetry TensorAlgebra{V} is a
multilinear mapping that is formally constructed by taking
the tensor products of linear and multilinear maps,
$(\bigotimes_k \omega_k)(v_1,\dots,v_{\sum_k p_k}) =
\prod_k \omega_k(v_1,\dots,v_{p_k})$. Higher
grade elements correspond to
Submanifold subspaces, while higher
order function elements become homogenous
polynomials and Taylor series.
julia> Λ(ℝ^3)DirectSum.Basis{⟨+++⟩,8}(v, v₁, v₂, v₃, v₁₂, v₁₃, v₂₃, v₁₂₃)julia> Λ(tangent(ℝ^2))DirectSum.Basis{T¹⟨++₁⟩,8}(v, v₁, v₂, ∂₁, v₁₂, ∂₁v₁, ∂₁v₂, ∂₁v₁₂)julia> Λ(tangent((ℝ^0)',3,3))DirectSum.Basis{T³⟨¹²³⟩',8}(w, ϵ₁, ϵ₂, ϵ₃, ϵ₁₂, ϵ₁₃, ϵ₂₃, ϵ₁₂₃)
Combining the linear basis generating elements with each
other using the multilinear tensor product yields a graded
(decomposable) tensor Submanifold
$\langle v_{i_1}\otimes\cdots\otimes v_{i_k}\rangle_k
: V'^k\rightarrow\mathbb K$, where rank
is determined by the sum of basis index multiplicities in
the tensor product decomposition. The Grassmann
anti-symmetric exterior basis is denoted by
$v_{i_1\dots i_g}\in\Lambda^gV$ having the
dual elements $w^{i_1\cdots
i_g}\in\Lambda^gV'$, while the Leibniz symmetric
basis will be denoted by
$\partial_{i_1}^{\mu_1}\dots\partial_{i_g}^{\mu_g}\in
L^gV$ with corresponding
$\epsilon_{i_1}^{\mu_1}\dots\epsilon_{i_g}^{\mu_g}\in
L^gV'$ adjoint elements. Combined, this space
produces the full Leibniz tangent algebra $T^\mu
V=V\oplus (\bigoplus_{g=1}^\mu L^g V)$ and the
Grassmann exterior algebra $\Lambda V =
\bigoplus_{g=1}^n\Lambda^g V$ with
$2^n$ elements. The mixed index algebra
$\Lambda(T^\mu V) = (\bigoplus_{g=1}^n\Lambda^g
V)\oplus(\bigoplus_{g=1}^\mu L^g V)$ is partitioned
into both symmetric and anti-symmetric tensor equivalence
classes. Any mixed tensor Submanifold pair
$\omega,\eta$ satisfies either
\[\underbrace{\omega\otimes\eta = -\eta\otimes\omega}_{\text{anti-symmetric}} \qquad \text{or} \qquad \underbrace{\omega\otimes\eta = \eta\otimes\omega}_{\text{symmetric}}.\]
For the oriented sets of the Grassmann exterior algebra, the parity of $(-1)^\Pi$ is factored into transposition compositions when interchanging ordering of the tensor product argument permutations. The symmetrical algebra does not need to track this parity, but has higher multiplicities in its indices. Symmetric differential function algebra of Leibniz trivializes the orientation into a single class of index multi-sets, while Grassmann's exterior algebra is partitioned into two oriented equivalence classes by anti-symmetry. Full tensor algebra can be sub-partitioned into equivalence classes in multiple ways based on the element symmetry, grade, and metric signature composite properties. Both symmetry classes can be characterized by the same geometric product.
julia> indices(Λ(3).v12)2-element Vector{Int64}: 1 2
A higher-order composite tensor element is an
oriented-multi-set $X$ such that $v_X =
\bigotimes_k v_{i_k}^{\otimes\mu_k}$ with the
indices $X =
\left((i_1,\mu_1),\dots,(i_g,\mu_g)\right)$ and
$|X|=\sum_k\mu_k$ is tensor rank.
Anti-symmetric indices $\Lambda X\subseteq\Lambda
V$ have two orientations and higher multiplicities
of them result in zero values, so the only interesting
multiplicity is $\mu_k\equiv1$. The
Leibniz-Taylor algebra is a quotient polynomial ring
$LV\cong R[x_1,\dots,x_n]/\{\prod_{k=1}^{\mu+1}
x_{p_k}\}$ so that $\partial_k^{\mu+1}$
is zero. Typically the $k$ in a product
$\left(\partial_{p_1}\otimes\cdots\otimes\partial_{p_k}\right)^{(k)}$
is referred to as the order of the element if
it is fully symmetric, which is overall tracked separately
from the grade such that
$\partial_k\langle v_j\rangle_r =
\langle\partial_kv_j\rangle_r$ and
$(\partial_k)^{(r)}\omega_j =
(\partial_kv_j)^{(r)}$. There is a partitioning into
even grade components $\omega_+$
and odd grade components
$\omega_-$ such that
$\omega_++\omega_-=\omega$.
Grassmann's exterior algebra doesn't invoke the
properties of multi-sets, as it is related to the algebra
of oriented sets; while the Leibniz symmetric algebra is
that of unoriented multi-sets. Combined, the mixed-symmetry
algebra yield a multi-linear propositional lattice. The
formal sum of equal grade elements is an
oriented Chain and with mixed
grade it is a Multivector
simplicial complex. Thus, various standard operations on
the oriented multi-sets are possible including
$\cup,\cap,\oplus$ and the index operation
$\ominus$, which is symmetric difference
operation.
Grassmann's exterior product is an anti-symmetric tensor product, this leads to
\[v_i \wedge v_j = - v_j\wedge v_i \implies v_i\wedge v_i = 0 = -v_i\wedge v_i,\]
and the generalized multilinear determinant transposition property
\[v_{\omega_1}\wedge\cdots\wedge v_{\omega_m}\wedge v_{\eta_1}\wedge\cdots\wedge v_{\eta_n} = (-1)^{mn} v_{\eta_1} \wedge \cdots \wedge v_{\eta_n} \wedge v_{\omega_1} \wedge \cdots \wedge v_{\omega_m}.\]
Hence for graded elements it is possible to deduce that
\[\omega \in \Lambda^mV,\quad\eta\in\Lambda^nV : \qquad \omega\wedge\eta = (-1)^{mn}\eta\wedge\omega.\]
Remark. Observe the anti-symmetry property implies that $\omega\otimes\omega = 0$, while the symmetric property neither implies nor denies such a property.
Example. Case of 3rd order tangent bundle operators composition:
\[T^3(\Lambda^0V) = \partial_\emptyset \oplus \partial_1\oplus\partial_2\oplus\partial_3 \oplus (\partial_1\circ\partial_2) \oplus (\partial_1\circ\partial_3) \oplus (\partial_2\circ\partial_3) \oplus (\partial_1\circ\partial_2\circ\partial_3)\]
In order to shorten the notation, the operation symbol is left out:
\[\{v_1,v_2,v_3,v_{12},v_{13},v_{23},v_{123}\}, \{\partial_1,\partial_2,\partial_3,\partial_{12},\partial_{13},\partial_{23},\partial_{123}\}\]
The canonical choice of orientation is with indices in sorted order, so that for example anti-symmetry is applied to rewrite $v_{21} = -v_{12}$ or the property $\partial_2\circ\partial_1 = \partial_1\circ\partial_2$ is applied for differential operators. In general, permutations of the indices get rendered as orientations of $(-1)^k$ of a basis $\mathbb{K}$-module.
Definition (Permutations). Consider $\displaystyle\sigma_j(\omega) = \sum_{k=0}^n(-1)^{\binom{k}{2^{j-1}}}\langle\omega\rangle_k$,
\[\sigma_1(\omega) \equiv \overline\omega, \qquad \sigma_2(\omega) \equiv \widetilde\omega, \qquad \sigma_{12} = \sigma_2(\sigma_1(\omega)) \equiv \widetilde{\overline{\omega}}\]
Theorem ($\mathfrak{S}_j = \langle\sigma_1,\sigma_2,\dots,\sigma_j\rangle$ is a group). $\mathfrak{S}_2 = \{1,\sigma_1,\sigma_2,\sigma_{12}\}$ is a set of automorphisms: grade involution $\overline\omega = \sigma_1(\omega) = \sum_{k=0}^n (-1)^{\binom{k}{1}}\langle\omega\rangle_k$, reverse $\widetilde\omega = \sigma_2(\omega) = \sum_{k=0}^n (-1)^{\binom{k}{2}}\langle\omega\rangle_k = \sum_{k=0}^n (-1)^{(k-1)k/2}\langle\omega\rangle_k$ is an anti-automorphism with $\sigma_2(v_i\wedge v_j) = \sigma_2(v_j)\wedge\sigma_2(v_i)$, and Clifford conjugate $\widetilde{\overline\omega}$ is the composition of grade involution and reverse anti-automorphism.
Definition (Real
$\widetilde{\mathfrak{R}}\omega = (\omega +
\widetilde\omega)/2$ and imaginary
$\widetilde{\mathfrak{I}}\omega = (\omega -
\widetilde\omega)/2$). Real and imaginary define
$\mathbb{Z}_2$-grading projections so that
$\Lambda V = \widetilde{\mathfrak{R}}\Lambda V \oplus
\widetilde{\mathfrak{I}}\Lambda V$; where
$\widetilde{\mathfrak{R}}\Lambda V$ is the
real part and
$\widetilde{\mathfrak{I}}\Lambda V$ is the
imag (imaginary) part.
Definition (Even
$\overline{\mathfrak{R}}\omega = (\omega +
\overline\omega)/2$ and odd
$\overline{\mathfrak{I}}\omega = (\omega -
\overline\omega)/2$). Even and odd define
$\mathbb{Z}_2$-grading projections so that
$\Lambda V = \overline{\mathfrak{R}}\Lambda V \oplus
\overline{\mathfrak{I}}\Lambda V$; where
$\overline{\mathfrak{R}}\Lambda V$ is the
even part and
$\overline{\mathfrak{I}}\Lambda V$ is the
odd part.
In general, this can be extended to $\mathbb{Z}_2$-grading projections $\sigma_j$ and its real $\sigma_j(\mathfrak{R})\omega = (\omega + \sigma_j(\omega))/2$ and imaginary $\sigma_j(\mathfrak{I})\omega = (\omega-\sigma_j(\omega))/2$ parts.
Grassmann.jl API design overview
Grassmann.jl is a foundation which has been built up from a minimal $\mathbb{K}$-module algebra kernel on which an entirely custom algbera specification is designed and built from scratch on the base Julia language.
Definition.
TensorAlgebra{V,$\mathbb{K}$}
where V::Submanifold{M} for a generating
$\mathbb{K}$-module specified by a
M::TensorBundle choice
-
TensorBundlespecifies generators ofDirectSum.BasisalgebraIntvalue induces a Euclidean metric of counted dimensionSignatureusesS"..."with + and - specifying the metricDiagonalFormusesD"..."for defining any diagonal metricMetricTensorcan accept non-diagonal metric tensor array
-
TensorGraded{V,G,$\mathbb{K}$}hasgrade$G$ and element of $\Lambda^GV$ subspace-
Chain{V,G,$\mathbb{K}$}has a complete basis for $\Lambda^GV$ with $\mathbb{K}$-module Simplex{V}alias column-moduleChain{V,1,Chain{V,1,$\mathbb{K}$}}
-
-
TensorTerm{V,G,$\mathbb{K}$} <: TensorGraded{V,G,$\mathbb{K}$}single coefficientZero{V}is a zero value which preserves $V$ in its algebra typeSubmanifold{V,G,B}$\langle v_{i_1}\wedge\cdots\wedge v_{i_G}\rangle_G$ with sorted indices $B$-
Single{V,G,B,$\mathbb{K}$}whereB::Submanifold{V}is paired to $\mathbb{K}$
-
AbstractSpinor{V,$\mathbb{K}$}subtypes are special sub-algebras of $\Lambda V$-
Couple{V,B,$\mathbb{K}$}is the sum of $\mathbb{K}$ scalar withSingle{V,G,B,$\mathbb{K}$} -
PseudoCouple{V,B,$\mathbb{K}$}is pseudoscalar +Single{V,G,B,$\mathbb{K}$} -
Spinor{V,$\mathbb{K}$}has complete basis for theeven$\mathbb{Z}_2$-graded terms -
CoSpinor{V,$\mathbb{K}$}has complete basis forodd$\mathbb{Z}_2$-graded terms
-
-
Multivector{V,$\mathbb{K}$}has complete basis for all $\Lambda V$ with $\mathbb{K}$-module
Definition.
TensorNested{V,T} subtypes are linear
transformations
-
TensorOperator{V,W,T}linear map $V\rightarrow W$ withT::DataTypeEndomorphism{V,T}linear map $V\rightarrow V$ withT::DataType
-
DiagonalOperator{V,T}diagonal map $V\rightarrow V$ withT::DataTypeDiagonalMorphism{V,<:Chain{V,1}}diagonal map $V\rightarrow V$-
DiagonalOutermorphism{V,<:Multivector{V}}$:\Lambda V\rightarrow \Lambda V$
Outermorphism{V,T}extends $F\in$Endomorphism{V}to full $\Lambda V$
\[F(v_1)\wedge\cdots\wedge F(v_n) = F(v_1\wedge\cdots\wedge v_n)\]
Projector{V,T}linear map $F:V\rightarrow V$ with $F(F) = F$ defined
\[\verb`Proj(x::TensorGraded)` = \frac{x}{|x|}\otimes\frac{x}{|x|}\]
Dyadic{V,X,Y}linear map $V\rightarrow V$ withDyadic(x,y)$= x\otimes y$
Grassmann.jl was first to define a
comprehensive TensorAlgebra{V} type system
from scratch around the idea of the
V::Submanifold{M} value to express algebra
subtypes for a specified $\mathbb{K}$-module
structure.
In Grassmann, a standard vector space is
initialized with Submanifold(N).
julia> V = Submanifold(4)
⟨1111⟩The type parameters of Submanifold{V, G, B}
are encoded with integers.
julia> dump(V)
Submanifold{4, 4, 0x000000000000000f} ⟨1111⟩Calling collect(V) or Λ(V)
produces a DirectSum.Basis.
julia> G4 = collect(V)
DirectSum.Basis{⟨1111⟩,16}(v, v₁, v₂, v₃, v₄, v₁₂, v₁₃, v₁₄, v₂₃, v₂₄, v₃₄, v₁₂₃, v₁₂₄, v₁₃₄, v₂₃₄, v₁₂₃₄)
julia> dump(G4.v12)
Submanifold{⟨1111⟩, 2, 0x0000000000000003} v₁₂The object G4::DirectSum.Basis can be used
to access algebra elements.
julia> G4.v12 + 2G4.v14
1v₁₂ + 0v₁₃ + 2v₁₄ + 0v₂₃ + 0v₂₄ + 0v₃₄
julia> typeof(G4.v12 + G4.v14)
Chain{⟨1111⟩, 2, Int64, 6}Subalgebra generated by V(1,4) can be
assigned to G42, for example.
julia> G42 = collect(V(1,4))
DirectSum.Basis{⟨1__1⟩,4}(v, v₁, v₄, v₁₄)
julia> sqrt(2) + G42.v14
1.4142135623730951 + 1.0v₁₄
julia> typeof(ans)
Couple{⟨1__1⟩, v₁₄, Float64}Otherwise, the @basis macro or
basis"..." can assign local symbols.
julia> @basis 3
(⟨111⟩, v, v₁, v₂, v₃, v₁₂, v₁₃, v₂₃, v₁₂₃)The One{V} type is an alias of
Submanifold{V,0} types, e.g. try
dump(v).
julia> 1 + v12 - v13
1 + 1v₁₂ - 1v₁₃ + 0v₂₃
julia> typeof(ans)
Quaternion{⟨111⟩, Int64} (alias for Spinor{⟨111⟩, Int64, 4})Hence, algebra elements can be created from the generating basis.
The direct way to construct elements is with
Values,
julia> Chain{V,1}(Values(4,5,6)) # Chain{V,1}(4,5,6)
4v₁ + 5v₂ + 6v₃while the value function returns the
Values representation
julia> value(Chain(4,5,6))
3-element Values{3, Int64} with indices SOneTo(3):
4
5
6where Chain(::Vararg{<:Number,N})
auto-selects V = Submanifold(N).
julia> wedge(Chain(1,2,3),Chain(4,5,6))
-3v₁₂ - 6v₁₃ - 3v₂₃Constructors for Spinor,
CoSpinor, Multivector are
similar.
julia> Spinor{V}(1,2,3,4)
1 + 2v₁₂ + 3v₁₃ + 4v₂₃Definition. Common unary operations on
TensorAlgebra elements
Manifoldreturns the parameterV::Submanifold{M}$\mathbb{K}$-modulemdimsdimensionality of the pseudoscalar $V$ of thatTensorAlgebragdimsdimensionality of the grade $G$ of $V$ for thatTensorAlgebratdimsdimensionality ofMultivector{V}for thatTensorAlgebragradereturns $G$ forTensorGraded{V,G}whilegrade(x,g)is $\langle x\rangle_g$istensorreturns true forTensorAlgebraelementsisgradedreturns true forTensorGradedelementsistermreturns true forTensorTermelementscomplementrightEuclidean metric Grassmann right complementcomplementleftEuclidean metric Grassmann left complementcomplementrighthodgeGrassmann-Hodge right complement $\widetilde\omega I$complementlefthodgeGrassmann-Hodge left complement $I\widetilde\omega$metricapplies themetricextensoras outermorphism operatorcometricapplies complementmetricextensoras outermorphismmetrictensorreturns $g:V\rightarrow V$ associated toTensorAlgebra{V}metrictextensorreturns $\Lambda g:\Lambda V\rightarrow\Lambda V$ forTensorAlgebra{V}involutegrade permutes basis with $\langle\overline\omega\rangle_k = \sigma_1(\langle\omega\rangle_k) = (-1)^k\langle\omega\rangle_k$reversepermutes basis with $\langle\widetilde\omega\rangle_k = \sigma_2(\langle\omega\rangle_k) = (-1)^{k(k-1)/2}\langle\omega\rangle_k$cliffordconjugate of an element is compositeinvolute$\circ$reverseevenpart selects $\overline{\mathfrak{R}}\omega = (\omega + \overline\omega)/2$ and is defined by $\Lambda^g$ for even $g$oddpart selects $\overline{\mathfrak{I}}\omega = (\omega-\overline\omega)/2$ and is defined by $\Lambda^g$ for odd $g$realpart selects $\widetilde{\mathfrak{R}}\omega = (\omega+\widetilde\omega)/2$ and is defined by $|\widetilde{\mathfrak{R}}\omega|^2 = (\widetilde{\mathfrak{R}}\omega)^2$imagpart selects $\widetilde{\mathfrak{I}}\omega = (\omega-\widetilde\omega)/2$ and is defined by $|\widetilde{\mathfrak{I}}\omega|^2 = -(\widetilde{\mathfrak{I}}\omega)^2$absis the absolute value $|\omega|=\sqrt{\widetilde\omega\omega}$ andabs2is then $|\omega|^2 = \widetilde\omega\omega$normevaluates a positive definite norm metric on the coefficientsunitapplies normalization defined asunit(t) = t/abs(t)scalarselects grade 0 term of anyTensorAlgebraelementvectorselects grade 1 terms of anyTensorAlgebraelementbivectorselects grade 2 terms of anyTensorAlgebraelementtrivectorselects grade 3 terms of anyTensorAlgebraelementpseudoscalarmax. grade term of anyTensorAlgebraelementvaluereturns internalValuestuple of aTensorAlgebraelementvaluetypereturns type of aTensorAlgebraelement value's tuple
Binary operations commonly used in
Grassmann algebra syntax
+and-carry over from the $\mathbb{K}$-module structure associated to $\mathbb{K}$wedgeis exterior product $\wedge$ andveeis regressive product $\vee$>is the right contraction and<is the left contraction for $\Lambda V$*is the geometric product and/usesinvalgorithm for division- $\oslash$ is the
sandwichand>>>is its alternate operator orientation
Custom methods related to tensor operators and roots of polynomials
invreturns the inverse andadjugatereturns transposed cofactordetreturns the scalar determinant of an endomorphism operatortrreturns the scalar trace of an endomorphism operatortransposeoperator has swapping of row and column indicescompound(F,g)is multilinear endomorphism $\Lambda^gF : \Lambda^g V\rightarrow\Lambda^g V$outermorphism(A)transforms $A:V\rightarrow V$ into $\Lambda A:\Lambda V\rightarrow\Lambda V$operatormake linear representation of multivector outermorphismcompanionmatrix of monic polynomial $a_0+a_1z+\dots+a_nz^n + z^{n+1}$roots(a...)of polynomial with coefficients $a_0 + a_1z + \dots + a_nz^n$rootsrealof polynomial with coefficients $a_0 + a_1z + \dots + a_nz^n$rootscomplexof polynomial with coefficients $a_0 + a_1z + \dots + a_nz^n$monicroots(a...)of monic polynomial $a_0+a_1z+\dots+a_nz^n + z^{n+1}$monicrootsrealof monic polynomial $a_0+a_1z+\dots+a_nz^n + z^{n+1}$monicrootscomplexof monic polynomial $a_0+a_1z+\dots+a_nz^n + z^{n+1}$characteristic(A)polynomial coefficients from $\det (A-\lambda I)$eigvals(A)are the eigenvalues $[\lambda_1,\dots,\lambda_n]$ so that $A e_i = \lambda_i e_i$eigvalsrealare real eigenvalues $[\lambda_1,\dots,\lambda_n]$ so that $A e_i = \lambda_i e_i$eigvalscomplexare complex eigenvalues $[\lambda_1,\dots,\lambda_n]$ so $A e_i = \lambda_i e_i$eigvecs(A)are the eigenvectors $[e_1,\dots,e_n]$ so that $A e_i = \lambda_i e_i$eigvecsrealare real eigenvectors $[e_1,\dots,e_n]$ so that $A e_i = \lambda_i e_i$eigvecscomplexare complex eigenvectors $[e_1,\dots,e_n]$ so $A e_i = \lambda_i e_i$eigen(A)spectral decomposition $\sum_i \lambda_i\text{Proj}(e_i)$ with $A e_i = \lambda_i e_i$eigenrealspectral decomposition $\sum_i \lambda_i\text{Proj}(e_i)$ with $A e_i = \lambda_i e_i$eigencomplexspectral decomposition $\sum_i \lambda_i\text{Proj}(e_i)$ so $A e_i = \lambda_i e_i$eigpolys(A)normalized symmetrized functions ofeigvals(A)eigpolys(A,g)normalized symmetrized function ofeigvals(A)vandermondefacilitates $((X'X)^{-1} X')y$ for polynomial coefficients-
cayley(V,$\circ$)returns product table for $V$ and binary operation $\circ$
Accessing metrictensor(V) produces a linear
map $g: V\rightarrow V$ which can be extended
to $\Lambda g:\Lambda V\rightarrow\Lambda V$
outermorphism given by metricextensor. To
apply the metricextensor to any
Grassmann element of $\Lambda V$,
the function metric can be used on the
element, cometric applies a complement
metric.
complexify converts two dimensional values
into its complex number form.
julia> complexify(1+im)
1 + 1im
julia> complexify(Chain(1,2))
1 + 2v₁₂vectorize converts two dimensional complex
numbers into vector form.
julia> vectorize(1+2im)
1v₁ + 2v₂
julia> vectorize(Couple(1,2))
1v₁ + 2v₂Grassmann-Hodge complement
John Browne has discussed the Grassmann duality principle, stating that every theorem (involving either of the exterior and regressive products) can be translated into its dual theorem by replacing the $\wedge$ and $\vee$ operations and applying Grassmann complements!
Definition (Grassmann $!$ complement). Expressed as unary operator, "right hand rule" is derived from John Browne's common factor theorem, given a pseudoscalar $\langle v_1\wedge\cdots\wedge v_n\rangle_n\in \Lambda^n V$ the linear map $!:\Lambda^mV \ra \Lambda^{n-m}V$
\[\langle v_{i_1}\wedge\cdots\wedge v_{i_m}\rangle_m \quad \mapsto \quad (-1)^{\frac{m(m+1)}{2} + \sum_{j=1}^m i_j} \langle\bigwedge_{k\ne i_j} v_k\rangle_{n-m},\]
also denoted as complementright for "right
hand rule." While the linear inverse of $!$ is
a similar map complementleft expressible by
re-orientation:
\[\langle v_{i_1}\wedge\cdots\wedge v_{i_m}\rangle_m \quad \mapsto \quad (-1)^{m(n-1)}!\langle v_{i_1}\wedge\cdots\wedge v_{i_m}\rangle_m.\]
Together, these form an orthocomplementary propositional lattice $!,\wedge,\vee$
\[(!\bigvee_k\omega_k)(v_1,\dots,v_n) = (\bigwedge_k !\omega_k)(v_1,\dots,v_n) \quad DeMorgan's\,\,Law,\]
where the regressive product $\vee$ satisfies the Grassmann laws with $!$ and $\wedge$.
complementrightEuclidean metric Grassmann right complement,complementleftEuclidean metric Grassmann left complement.
julia> complementright(Multivector(1,2,3,4,5,6,7,8))
8 + 7v₁ - 6v₂ + 5v₃ + 4v₁₂ - 3v₁₃ + 2v₂₃ + 1v₁₂₃
julia> complementleft(Multivector(1,2,3,4,5,6,7,8))
8 + 7v₁ - 6v₂ + 5v₃ + 4v₁₂ - 3v₁₃ + 2v₂₃ + 1v₁₂₃Definition (Hodge $\star$
complement). Expressed as unary operator
$\star$, define the composition of
$\star =$ complementright
$\circ$ metric as linear
operator.
\[\star ={!\Lambda g} : \Lambda V \rightarrow \Lambda V\]
This linear operator is also called
complementrighthodge or only
hodge.
complementrighthodgeGrassmann-Hodge right complement $\widetilde\omega I$complementlefthodgeGrassmann-Hodge left complement $I\widetilde\omega$
julia> complementrighthodge(Multivector(1,2,3,4,5,6,7,8))
8 + 7v₁ - 6v₂ + 5v₃ + 4v₁₂ - 3v₁₃ + 2v₂₃ + 1v₁₂₃Remark. Original Grassmann complement
is equivalent to the Hodge complement with a Euclidean
metric tensor, making metric an
identity.
julia> @basis S"++-"
(⟨++-⟩, v, v₁, v₂, v₃, v₁₂, v₁₃, v₂₃, v₁₂₃)
julia> hodge(Multivector{V}(1,2,3,4,5,6,7,8))
-8 - 7v₁ + 6v₂ + 5v₃ - 4v₁₂ - 3v₁₃ + 2v₂₃ + 1v₁₂₃Definition. The interior contraction $\eta\cdot\omega = \eta\vee\star\omega$ is defined in terms of the regressive product and also the Hodge complement. By default the right contraction $>$ is used, but there is also a left contraction $<$ with swapped arguments $\eta<\omega = \omega\vee\star\eta$, and also $\eta >> \omega = \widetilde\eta >\omega$ with $\eta << \omega = \eta <\widetilde{\omega}$.
julia> vee(Chain{V}(1,2,3),hodge(Chain{V}(4,5,6)))
-4vRemark. Using coupled subspaces in the block matrix structure of metric tensors, a basis element can be factorized in a corresponding way. In particular, for the diagonal metric this is simply the basis index factorization. However, a non-diagonal metric induces a more complex block factorization.
Definition (Clifford geometric product). If $a_i$ is an indecomposable basis element with regards to the block matrix structure of the metric tensor and $B\in\Lambda^kV$ is a graded element, then define operation $\ominus$ as either
\[ a_i\ominus B = a_i\wedge B + a_i<\widetilde B, \qquad B\ominus a_i = B\wedge a_i + \widetilde B>a_i\]
If $A = a_1\wedge\cdots\wedge a_m$ are a
basis factorization, then $a_1\ominus\cdots\ominus
a_m = a_1\wedge\cdots\wedge a_m$. Furthermore, if
also $a_1\ominus\dots\ominus(a_m\ominus B) =
a_1\ominus\dots\ominus(a_m\wedge B+a_m<\widetilde
B)$ can be expanded to distribute the operations of
$A\ominus B$. By applying this principle with
the distributive law over the basis of $\Lambda
V$, the Clifford product is defined. In Julia, the
multiplication symbol * can be used for
geometric products.
Definition (Diagonal geometric product). The diagonal geometric product is the oriented symmetric difference operator $\ominus$ (weighted by the bilinear form $g$) and multi-set sum $\oplus$ applied to multilinear tensor products $\otimes$ in a single operation.
\[\omega_X\ominus \eta_Y = \underbrace{\overbrace{(-1)^{\Pi(X,Y)}}^{\text{orient parity}}\overbrace{\det\left[g_{\Lambda(X\cap Y)}\right]}^{\text{intersect metric}} (\overbrace{\bigotimes_{k\in \Lambda(X\ominus Y)} v^{i_k}}^{(X\cup Y)\backslash(X\cap Y)}}_{\Lambda^1-anti-symmetric,\, \Lambda^g-mixed-symmetry})\otimes (\underbrace{\overbrace{\bigotimes_{k\in L(X\oplus Y)} \partial_{i_k}^{\otimes\mu_k}}^{\text{multi-set sum}}}_{L^g-symmetric})\]
Remark. For any $v_i \in \Lambda^1V$, we define $v_i^2 = v_iv_i = g_{ii}$, so typically the diagonal metric $g$ of the algebra is often defined by relations like these.
julia> Chain(1,2,3)*Chain(4,5,6)
32 - 3v₁₂ - 6v₁₃ - 3v₂₃Remark: The product symbol $\ominus$ will be used to denote explicitly usage of the diagonal geometric product, although the standard number product $*$ notation could also be used. The $\ominus$ choice helps emphasize that the diagonal geometric product is characterized by symmetric differencing of anti-symmetric indices.
Definition. The geometric product can be applied in two averaging operations, which are symmetrization and anti-symmetrization operations:
\[\bigodot_{k=1}^j\omega_k = \frac{1}{j!} \sum_{\sigma\in S_j} \prod\omega_{\sigma(k)}, \qquad \bigwedge_{k=1}^j \omega_k = \sum_{\sigma\in S_j} \frac{(-1)^{\varepsilon(\sigma)}}{j!} \prod_k\omega_{\sigma(k)}\]
Example (Reverse, involute, conjugate). The
reverse of
$\langle\omega\rangle_r$ is defined as
$\langle\tilde\omega\rangle_r =
(-1)^{(r-1)r/2}\langle\omega\rangle_r$, while the
involute is
$\langle\omega\rangle_r^\times=(-1)^r\langle\omega\rangle_r$
and clifford
$\langle\omega\rangle_r^\ddagger$ is the
composition of involute and
reverse.
Definition (Reversed product). Consider the reversed product $\langle\widetilde\omega\omega\rangle$.
\[|\omega|^2 = \langle\widetilde\omega\omega\rangle, \qquad |\omega| = \sqrt{\langle\widetilde\omega\omega\rangle}, \qquad ||\omega|| = \text{Euclidean } |\omega|.\]
Remark. In general $\sqrt{\omega} = e^{(\log\omega)/2}$ is valid for invertible $\omega$.
Example (Inverse). $\omega^{-1} = \widetilde\omega(\widetilde\omega\omega)^{-1} = \widetilde\omega/|\omega|^2$, with $\eta/\omega = \eta\omega^{-1}$ and $\eta\backslash\omega = \eta^{-1}\omega$.
Definition (Sandwich product). Define
operator as $\eta\oslash\omega =
\overline\omega^{-1}\eta\omega$. Alternatively, the
reversed definition is
$\eta\omega\overline\eta^{-1}$ typically
notated $\eta$ >>>
$\omega$.
The real part $\Re\omega =
(\omega+\tilde\omega)/2$ is defined by
$|\Re\omega|^2 = (\Re\omega)^{\ominus2}$ and
the imag part $\Im\omega =
(\omega-\tilde\omega)/2$ by $|\Im\omega|^2 =
-(\Im\omega)^{\ominus2}$, such that $\omega =
\Re\omega+\Im\omega$ has real and imaginary
partitioned by
\[\langle\widetilde\omega\rangle_r/\left|\langle\omega\rangle_r\right| = \sqrt{\langle\widetilde\omega\rangle_r^2/\left|\langle\omega\rangle_r\right|^2} = \sqrt{\langle\widetilde\omega\rangle_r/\langle\omega\rangle_r} = \sqrt{(-1)^{(r-1)r/2}} \in \set{1,\sqrt{-1}},\]
which is a unique partitioning completely independent of the metric space and manifold of the algebra.
\[\widetilde\omega\omega = |\omega|^2 = |\mathfrak R\omega + \mathfrak I\omega|^2 = |\mathfrak R\omega|^2 + |\mathfrak I\omega|^2 + 2\mathfrak R(\mathfrak R\omega\mathfrak I\omega)\]
Since $\langle(\widetilde\omega+\omega)(\omega+\widetilde\omega)\rangle = (\omega+\widetilde\omega)^2$, it follows $|\mathfrak{R}\omega|^2 = (\mathfrak{R}\omega)^2$. Similarly, $\langle(\widetilde\omega-\omega)(\omega-\widetilde\omega)\rangle = -(\omega+\widetilde\omega)^2$ implies $|\mathfrak{I}\omega|^2 = -(\mathfrak{I}\omega)^2$. Due to the $\mathbb{Z}_2$-grading induced by $\omega = \mathfrak{R}\omega + \mathfrak{I}\omega$, it has real and imaginary.
Lemma Let $\omega\in\Lambda^m V$, then $I\vee\omega = \omega$.
Proof. Lemma proved by Michael Reed in Grassmann.jl research papers.
Corollary. Observe, $\star\omega = \widetilde\omega I = I\cdot\omega$ since $I\cdot\omega = I\vee\star\omega = \star\omega$.
Theorem. Let $\omega\in\Lambda^m V$, then $\star\star\omega = (-1)^{m(n-m)}\omega |I|^2$.
Proof. Theorem proved by Michael Reed in Grassmann.jl research papers.
Corollary (Euclidean complement of a complement). Let $\omega\in\Lambda^m(\mathbb R^n)$, then $\star\star\omega = (-1)^{m(n-m)}\omega$ since $|I|^2=1$.
Theorem. Let $\omega\in\Lambda^m V$, then $(\omega\vee\star\omega)I = \omega\wedge\star\omega$.
Proof. Theorem proved by Michael Reed in Grassmann.jl research papers.
Theorem. $\eta\wedge\star\omega = (\widetilde\omega\vee\star\widetilde\eta)I = (\widetilde\omega\cdot\widetilde\eta)I \iff \eta\cdot\omega = \eta\vee\star\omega = (\widetilde\omega\wedge\star\widetilde\eta)/I$.
Theorem. Let $\eta,\omega\in\Lambda^mV$, then $\tilde\eta\cdot\tilde\omega = \eta\cdot\omega$.
Corollary (Absolute value $|\omega|^2=\omega\cdot\omega$).
\[(\omega\cdot\omega)I = \tilde\omega\wedge\star\tilde\omega = \tilde\omega\star\tilde\omega = \tilde\omega\omega I = |\omega|^2I \iff \omega\cdot\omega = \tilde\omega\omega\]
Theorem (Hodge complement). Let $\omega\in\Lambda^mV$, then $\omega\wedge\star\omega = \langle\omega\vee\star\omega\rangle I$.
Proof. Theorem proved by Michael Reed in Grassmann.jl research papers.
The expressions can also be reversed: $\omega\wedge\star\omega = \omega\star\omega = \omega\tilde\omega I = |\omega|^2I$. However, when $\eta\in\Lambda^rV$ and $\omega\in\Lambda^sV$ are of unequal grade, then there exist several possible variations of graded contraction operations. Of course, the most natural option for the interior contraction is Grassmann's right contraction also written $\eta |\omega = \eta\vee\star\omega$. However, many authors such as Dorst prefer the Conventional contraction, which is one of the other variations.
| Contraction | left($\eta,\omega$) | right($\eta,\omega$) |
|---|---|---|
| Grassmann | $\langle\eta\rangle_s < \langle\omega\rangle_r = \langle\tilde\eta\omega\rangle_{s-r}$ | $\langle\eta\rangle_r > \langle\omega\rangle_s = \langle\tilde\eta\omega\rangle_{r-s}$ |
| Reversed | $\langle\tilde\eta\rangle_s < \langle\tilde\omega\rangle_r = \langle\eta\tilde\omega\rangle_{s-r}$ | $\langle\tilde\eta\rangle_r > \langle\tilde\omega\rangle_s = \langle\eta\tilde\omega\rangle_{r-s}$ |
| Conventional | $\langle\eta\rangle_s << \langle\omega\rangle_r = \langle\eta\omega\rangle_{s-r}$ | $\langle\eta\rangle_r >> \langle\omega\rangle_s = \langle\eta\omega\rangle_{r-s}$ |
When using Grassmann in a session, the
cayley table can be used to recall geometric
algebra information, e.g. to compare $>$
and $>>$ contractions:
cayley(Submanifold(1),wedge)
cayley(Submanifold(1),vee)\[\begin{array}{c|cc} \wedge & v & v_{1} \\ \hline v & v & v_{1} \\ v_{1} & v_{1} & 0 \end{array}, \qquad \begin{array}{c|cc} \vee & v & v_{1} \\ \hline v & 0 & v \\ v_{1} & v & v_{1} \end{array}\]
cayley(Submanifold(1),<)
cayley(Submanifold(1),>)\[\begin{array}{c|cc} < & v & v_{1} \\ \hline v & v & v_{1} \\ v_{1} & 0 & v \end{array}, \qquad \begin{array}{c|cc} > & v & v_{1} \\ \hline v & v & 0 \\ v_{1} & v_{1} & v \end{array}\]
cayley(Submanifold(1),<<)
cayley(Submanifold(1),>>)\[\begin{array}{c|cc} << & v & v_{1} \\ \hline v & v & v_{1} \\ v_{1} & 0 & v \end{array}, \qquad \begin{array}{c|cc} >> & v & v_{1} \\ \hline v & v & 0 \\ v_{1} & v_{1} & v \end{array}\]
cayley(Submanifold(S"-"),wedge)
cayley(Submanifold(S"-"),vee)\[\begin{array}{c|cc} \wedge & v & v_{1} \\ \hline v & v & v_{1} \\ v_{1} & v_{1} & 0 \end{array}, \qquad \begin{array}{c|cc} \vee & v & v_{1} \\ \hline v & 0 & v \\ v_{1} & v & v_{1} \end{array}\]
cayley(Submanifold(S"-"),<)
cayley(Submanifold(S"-"),>)\[\begin{array}{c|cc} < & v & v_{1} \\ \hline v & v & v_{1} \\ v_{1} & 0 & -1v \end{array}, \qquad \begin{array}{c|cc} > & v & v_{1} \\ \hline v & v & 0 \\ v_{1} & v_{1} & -1v \end{array}\]
cayley(Submanifold(S"-"),<<)
cayley(Submanifold(S"-"),>>)\[\begin{array}{c|cc} << & v & v_{1} \\ \hline v & v & v_{1} \\ v_{1} & 0 & -1v \end{array}, \qquad \begin{array}{c|cc} >> & v & v_{1} \\ \hline v & v & 0 \\ v_{1} & v_{1} & -1v \end{array}\]
cayley(Submanifold(2),wedge) # ...\[\begin{array}{c|cccc} \wedge & v & v_{1} & v_{2} & v_{12} \\ \hline v & v & v_{1} & v_{2} & v_{12} \\ v_{1} & v_{1} & 0 & v_{12} & 0 \\ v_{2} & v_{2} & -1v_{12} & 0 & 0 \\ v_{12} & v_{12} & 0 & 0 & 0 \end{array}, \qquad \begin{array}{c|cccc} \vee & v & v_{1} & v_{2} & v_{12} \\ \hline v & 0 & 0 & 0 & v \\ v_{1} & 0 & 0 & v & v_{1} \\ v_{2} & 0 & -1v & 0 & v_{2} \\ v_{12} & v & v_{1} & v_{2} & v_{12} \end{array}\]
\[\begin{array}{c|cccc} < & v & v_{1} & v_{2} & v_{12} \\ \hline v & v & v_{1} & v_{2} & v_{12} \\ v_{1} & 0 & v & 0 & v_{2} \\ v_{2} & 0 & 0 & v & -1v_{1} \\ v_{12} & 0 & 0 & 0 & v \end{array}, \qquad \begin{array}{c|cccc} > & v & v_{1} & v_{2} & v_{12} \\ \hline v & v & 0 & 0 & 0 \\ v_{1} & v_{1} & v & 0 & 0 \\ v_{2} & v_{2} & 0 & v & 0 \\ v_{12} & v_{12} & v_{2} & -1v_{1} & v \end{array}\]
\[\begin{array}{c|cccc} << & v & v_{1} & v_{2} & v_{12} \\ \hline v & v & v_{1} & v_{2} & v_{12} \\ v_{1} & 0 & v & 0 & v_{2} \\ v_{2} & 0 & 0 & v & -1v_{1} \\ v_{12} & 0 & 0 & 0 & -1v \end{array}, \qquad \begin{array}{c|cccc} >> & v & v_{1} & v_{2} & v_{12} \\ \hline v & v & 0 & 0 & 0 \\ v_{1} & v_{1} & v & 0 & 0 \\ v_{2} & v_{2} & 0 & v & 0 \\ v_{12} & -1v_{12} & -1v_{2} & 1v_{1} & -1v \end{array}\]
cayley(Submanifold(S"+-"),wedge) # ...\[\begin{array}{c|cccc} \wedge & v & v_{1} & v_{2} & v_{12} \\ \hline v & v & v_{1} & v_{2} & v_{12} \\ v_{1} & v_{1} & 0 & v_{12} & 0 \\ v_{2} & v_{2} & -1v_{12} & 0 & 0 \\ v_{12} & v_{12} & 0 & 0 & 0 \end{array}, \qquad \begin{array}{c|cccc} \vee & v & v_{1} & v_{2} & v_{12} \\ \hline v & 0 & 0 & 0 & v \\ v_{1} & 0 & 0 & v & v_{1} \\ v_{2} & 0 & -1v & 0 & v_{2} \\ v_{12} & v & v_{1} & v_{2} & v_{12} \end{array}\]
\[\begin{array}{c|cccc} < & v & v_{1} & v_{2} & v_{12} \\ \hline v & v & v_{1} & v_{2} & v_{12} \\ v_{1} & 0 & v & 0 & v_{2} \\ v_{2} & 0 & 0 & -1v & v_{1} \\ v_{12} & 0 & 0 & 0 & -1v \end{array}, \qquad \begin{array}{c|cccc} > & v & v_{1} & v_{2} & v_{12} \\ \hline v & v & 0 & 0 & 0 \\ v_{1} & v_{1} & v & 0 & 0 \\ v_{2} & v_{2} & 0 & -1v & 0 \\ v_{12} & v_{12} & v_{2} & v_{1} & -1v \end{array}\]
\[\begin{array}{c|cccc} << & v & v_{1} & v_{2} & v_{12} \\ \hline v & v & v_{1} & v_{2} & v_{12} \\ v_{1} & 0 & v & 0 & v_{2} \\ v_{2} & 0 & 0 & -1v & v_{1} \\ v_{12} & 0 & 0 & 0 & 1v \end{array}, \qquad \begin{array}{c|cccc} >> & v & v_{1} & v_{2} & v_{12} \\ \hline v & v & 0 & 0 & 0 \\ v_{1} & v_{1} & v & 0 & 0 \\ v_{2} & v_{2} & 0 & -1v & 0 \\ v_{12} & -1v_{12} & -1v_{2} & -1v_{1} & 1v \end{array}\]
cayley(Submanifold(3),wedge)\[\begin{array}{c|cccccccc} \wedge & v & v_{1} & v_{2} & v_{3} & v_{12} & v_{13} & v_{23} & v_{123} \\ \hline v & v & v_{1} & v_{2} & v_{3} & v_{12} & v_{13} & v_{23} & v_{123} \\ v_{1} & v_{1} & 0 & v_{12} & v_{13} & 0 & 0 & v_{123} & 0 \\ v_{2} & v_{2} & -1v_{12} & 0 & v_{23} & 0 & -1v_{123} & 0 & 0 \\ v_{3} & v_{3} & -1v_{13} & -1v_{23} & 0 & v_{123} & 0 & 0 & 0 \\ v_{12} & v_{12} & 0 & 0 & v_{123} & 0 & 0 & 0 & 0 \\ v_{13} & v_{13} & 0 & -1v_{123} & 0 & 0 & 0 & 0 & 0 \\ v_{23} & v_{23} & v_{123} & 0 & 0 & 0 & 0 & 0 & 0 \\ v_{123} & v_{123} & 0 & 0 & 0 & 0 & 0 & 0 & 0 \end{array}\]
cayley(Submanifold(3),vee)\[\begin{array}{c|cccccccc} \vee & v & v_{1} & v_{2} & v_{3} & v_{12} & v_{13} & v_{23} & v_{123} \\ \hline v & 0 & 0 & 0 & 0 & 0 & 0 & 0 & v \\ v_{1} & 0 & 0 & 0 & 0 & 0 & 0 & v & v_{1} \\ v_{2} & 0 & 0 & 0 & 0 & 0 & -1v & 0 & v_{2} \\ v_{3} & 0 & 0 & 0 & 0 & v & 0 & 0 & v_{3} \\ v_{12} & 0 & 0 & 0 & v & 0 & v_{1} & v_{2} & v_{12} \\ v_{13} & 0 & 0 & -1v & 0 & -1v_{1} & 0 & v_{3} & v_{13} \\ v_{23} & 0 & v & 0 & 0 & -1v_{2} & -1v_{3} & 0 & v_{23} \\ v_{123} & v & v_{1} & v_{2} & v_{3} & v_{12} & v_{13} & v_{23} & v_{123} \end{array}\]
cayley(Submanifold(3),*) # Clifford geometric product *\[\begin{array}{c|cccccccc} * & v & v_1 & v_2 & v_3 & v_{12} & v_{13} & v_{23} & v_{123} \\ \hline v & v & v_1 & v_2 & v_3 & v_{12} & v_{13} & v_{23} & v_{123} \\ v_1 & v_1 & v & v_{12} & v_{13} & v_2 & v_3 & v_{123} & v_{23} \\ v_2 & v_2 & -v_{12} & v & v_{23} & -v_1 & -v_{123} & v_3 & -v_{13} \\ v_3 & v_3 & -v_{13} & -v_{23} & v & v_{123} & -v_1 & -v_2 & v_{12} \\ v_{12} & v_{12} & -v_2 & v_1 & v_{123} & -v & -v_{23} & v_{13} & -v_3 \\ v_{13} & v_{13} & -v_3 & -v_{123} & v_1 & v_{23} & -v & -v_{12} & v_2 \\ v_{23} & v_{23} & v_{123} & -v_3 & v_2 & -v_{13} & v_{12} & -v & -v_1 \\ v_{123} & v_{123} & v_{23} & -v_{13} & v_{12} & -v_3 & v_2 & -v_1 & -v \end{array}\]
cayley(Submanifold(3),<)\[\begin{array}{c|cccccccc} < & v & v_{1} & v_{2} & v_{3} & v_{12} & v_{13} & v_{23} & v_{123} \\ \hline v & v & v_{1} & v_{2} & v_{3} & v_{12} & v_{13} & v_{23} & v_{123} \\ v_{1} & 0 & v & 0 & 0 & v_{2} & v_{3} & 0 & v_{23} \\ v_{2} & 0 & 0 & v & 0 & -1v_{1} & 0 & v_{3} & -1v_{13} \\ v_{3} & 0 & 0 & 0 & v & 0 & -1v_{1} & -1v_{2} & v_{12} \\ v_{12} & 0 & 0 & 0 & 0 & v & 0 & 0 & v_{3} \\ v_{13} & 0 & 0 & 0 & 0 & 0 & v & 0 & -1v_{2} \\ v_{23} & 0 & 0 & 0 & 0 & 0 & 0 & v & v_{1} \\ v_{123} & 0 & 0 & 0 & 0 & 0 & 0 & 0 & v \end{array}\]
Side note, demonstration of \verbusing
Grassmann algebra laws:
julia> basis"3"
(⟨111⟩, v, v₁, v₂, v₃, v₁₂, v₁₃, v₂₃, v₁₂₃)
julia> wedge(!v12,!v23)
-1v₁₃Side note, demonstration of Grassmann algebra laws:
julia> !vee(v12,v23)
-1v₁₃
julia> wedge(v12,!v12)
1v₁₂₃cayley(Submanifold(3),>) # Grassmann contraction >\[\begin{array}{c|cccccccc} > & v & v_1 & v_2 & v_3 & v_{12} & v_{13} & v_{23} & v_{123} \\ \hline v & v & 0 & 0 & 0 & 0 & 0 & 0 & 0 \\ v_1 & v_1 & v & 0 & 0 & 0 & 0 & 0 & 0 \\ v_2 & v_2 & 0 & v & 0 & 0 & 0 & 0 & 0 \\ v_3 & v_3 & 0 & 0 & v & 0 & 0 & 0 & 0 \\ v_{12} & v_{12} & v_2 & -v_1 & 0 & v & 0 & 0 & 0 \\ v_{13} & v_{13} & v_3 & 0 & -v_1 & 0 & v & 0 & 0 \\ v_{23} & v_{23} & 0 & v_3 & -v_2 & 0 & 0 & v & 0 \\ v_{123} & v_{123} & v_{23} & -v_{13} & v_{12} & v_3 & -v_2 & v_1 & v \end{array}\]
cayley(Submanifold(3),<<)\[\begin{array}{c|cccccccc} << & v & v_{1} & v_{2} & v_{3} & v_{12} & v_{13} & v_{23} & v_{123} \\ \hline v & v & v_{1} & v_{2} & v_{3} & v_{12} & v_{13} & v_{23} & v_{123} \\ v_{1} & 0 & v & 0 & 0 & v_{2} & v_{3} & 0 & v_{23} \\ v_{2} & 0 & 0 & v & 0 & -1v_{1} & 0 & v_{3} & -1v_{13} \\ v_{3} & 0 & 0 & 0 & v & 0 & -1v_{1} & -1v_{2} & v_{12} \\ v_{12} & 0 & 0 & 0 & 0 & -1v & 0 & 0 & -1v_{3} \\ v_{13} & 0 & 0 & 0 & 0 & 0 & -1v & 0 & 1v_{2} \\ v_{23} & 0 & 0 & 0 & 0 & 0 & 0 & -1v & -1v_{1} \\ v_{123} & 0 & 0 & 0 & 0 & 0 & 0 & 0 & -1v \end{array}\]
cayley(Submanifold(3),>>) # Conventional contraction >>\[\begin{array}{c|cccccccc} >> & v & v_1 & v_2 & v_3 & v_{12} & v_{13} & v_{23} & v_{123} \\ \hline v & v & 0 & 0 & 0 & 0 & 0 & 0 & 0 \\ v_1 & v_1 & v & 0 & 0 & 0 & 0 & 0 & 0 \\ v_2 & v_2 & 0 & v & 0 & 0 & 0 & 0 & 0 \\ v_3 & v_3 & 0 & 0 & v & 0 & 0 & 0 & 0 \\ v_{12} & -v_{12} & -v_2 & v_1 & 0 & -v & 0 & 0 & 0 \\ v_{13} & -v_{13} & -v_3 & 0 & v_1 & 0 & -v & 0 & 0 \\ v_{23} & -v_{23} & 0 & -v_3 & v_2 & 0 & 0 & -v & 0 \\ v_{123} & -v_{123} & -v_{23} & v_{13} & -v_{12} & -v_3 & v_2 & -v_1 & -v \end{array}\]
Grassmann does not implement
Quaternion as a struct, but quaternions are
realized as an alias Grassmann.Quaternion (alias for
Spinor{V, T, 4} where {V, T}).
Comparison of quaternions in the context of
Grassmann to other quaternion implementations
is characterized by syntax design differences to fit into a
larger mathematical formalism. Differences such as
performance or edge cases can always be smoothed out, while
syntax and design choices are fundamentally different. With
Grassmann geometric algebra it is possible to
achieve much more out of quaternions due to the immediate
access to its fully general mathematical formalism.
Quaternion algebra exists as a specialized sub-algebra
within a more general Grassmann geometric
algebra, where the goal is to seamlessly transition between
quaternion abstractions and algebraic generalizations.
There are several ways to assign i,j,k with
Grassmann elements, perhaps the standard would
be i = v12, j = -v13, k =
v23 (although this is not a unique choice). Since
j and v13 have opposite sign in
this notation, the quatvalues method is
exported to output the coefficients with the sign
convention of s,i,j,k.
- assign
Grassmannelements for quaternion usage:using Grassmann; basis"3" - basis:
v, v₁, v₂, v₃, v₁₂, v₁₃, v₂₃, v₁₂₃orv, v1, v2, v3, v12, v13, v23, v123 - assign quaternion basis:
s, i, j, k = v, v12, -v13, v23could be a standard choice quatvalues(::Quaternion)returns the coefficient values according tos, i, j, kquaternion(s,i,j,k)returns theGrassmannquaternion from thes, i, j, kstandard
As a result of the framework of geometric algebra
implemented in Grassmann, vector algebra and
quaternion algebra are compatible in a unified formalism.
Given a quaternion operator R and a vector
x the operator can be applied with either the
R>>>x (evaluated as
R*x*conj(R) operator) or x⊘R
(evaluated as conj(R)*x*R operator) to
transform vectors with quaternions. Converting a quaternion
operator R on a three dimensional vector to a
matrix (with the x⊘R evaluation) can be done
with Matrix(operator(R)) for convenience.
In the traditional quaternion packages there is only
access to a limited mathematical scope constrained to
rotations in three dimensions, while in
Grassmann there are rotational algebras for
lower and higher dimensions and it is also natural to deal
with reflection operator compositions and more. This
developer (for example), will feel a loss of mathematical
expressibility when downgrading from Grassmann
to a more limited quaternion formalism, as
Grassmann can express the full graded algebra
structure compared to the mere sub-algebra of quaternions.
Programming using a more general and sophisticated
mathematical formalism typically involves a more abstract
and verbose syntax, and this is the case for Grassman.jl as
compared to Quaternions.jl
It is possible to assign the quaternion generators $i,j,k$ with
julia> i,j,k = hyperplanes(ℝ^3)3-element Vector{Single{⟨+++⟩, 2, B, Int64} where B}: 1v₂₃ -1v₁₃ 1v₁₂julia> i^2, j^2, k^2, i*j*k(-1v, -1v, -1v, 1v)julia> -(j+k) * (j+k)2 + 0v₁₂ + 0v₁₃ + 0v₂₃julia> -(j+k) * i0 - 1v₁₂ - 1v₁₃ + 0v₂₃
Alternatively, another representation of the quaternions is
julia> basis"--"(⟨--⟩, v, v₁, v₂, v₁₂)julia> v1^2, v2^2, v12^2, v1*v2*v12(-1v, -1v, -1v, -1v)
Theorem (Linear system of equations) Let $p_0,\dots,p_n \in \Lambda^1V$,
\[[p_1,\dots,p_n] \vee \star\sum_{i=1}^n \frac{p_{1\dots(i-1)}\wedge p_0 \wedge p_{(i+1)\dots n}}{p_{1\dots n}}v_i = p_0.\]
Proof. Theorem proved by Michael Reed in Grassmann.jl research papers.
Remark. Grassmann methods
for low dimensional linear systems are more numerically
stable than Julia Base.LinearAlegbra methods
and fast.
[1 2; 3 4]\[5,6] # inexact
@TensorOperator([1 2; 3 4])\Chain(5,6) # exact\[ \begin{bmatrix} -3.9999999999999987 \\ 4.499999999999999 \end{bmatrix}, \qquad \begin{bmatrix} -4 \\ 4.5 \end{bmatrix}\]
This means that using only exterior products there is an explicit solution to linear systems by allocating both of $\{p_{1\dots i}\wedge p_{i+1}\}_{i=0}^{n-1}$ and $\{p_{n-i}\wedge p_{(n-i+1)\dots n}\}_{i=0}^{n-1}$ and then taking exterior product permutations with $p_0$ also.
\[p_0 \in [p_1,\dots,p_n] \Longleftrightarrow \forall i : p_{1\dots n} = p_{1\dots(i-1)}\wedge p_0\wedge p_{(i+1)\dots n}\]
Since exterior products are oriented, it is sufficient
to check the orientation of the hyperplanes with respect to
the reference point for determining whether
$p_0$ is a point contained in the simplex
$p_{1\dots n}$. Thus, it is sufficient to
check the orientation of all the same exterior products as
when solving linear systems, while calculating a linear
inv (inverse) involves only a partial
application of this principle and requires also allocating
a transposed dyadic result:
\[[p_1,\dots,p_n]^{-1} = \left(\sum_{i=1}^n\star\frac{p_{1\dots(i-1)}\wedge p_{(i+1)\dots n}}{((-1)^i)^{n-1}p_{1\dots n}}v_i \right)^T\]
Furthermore, the $P\backslash p_0$ method
implementation is a partial application of this with the
action of an operator. Consider operator
composed with inv
B = v12+2v13-3v23 # using Grassmann; basis"3"
operator(B) # convert B to endomorphisim representation
inv(operator(B))
operator(inv(B))\[ \begin{bmatrix} 4 & 12 & -6 \\ 12 & -6 & -4 \\ -6 & -4 & -12 \end{bmatrix}, \qquad \begin{bmatrix} 0.0204082 & 0.0612245 & -0.0306122 \\ 0.0612245 & -0.0306122 & -0.0204082 \\ -0.0306122 & -0.0204082 & -0.0612245 \end{bmatrix}\]
Let $\nabla = \sum_k\partial_kv_k$ be a vector field and $\epsilon = \sum_k\epsilon_k(x)w_k \in \Omega^1V$ be unit sums of the mixed-symmetry basis. Elements of $\Omega^pV$ are known as differential $p$-forms and both $\nabla$ and $\epsilon$ are tensor fields dependent on $x\in W$. Another notation for a differential form is $dx_k = \epsilon_k(x)w_k$, such that $\epsilon_k = dx_k/w_k$ and $\partial_k\omega(x) = \omega'(x)$.
julia> tangent(ℝ^3)(∇)0v₁₂ + 0v₁₃ + 1∂₁v₁ + 0v₂₃ + 1∂₁v₂ + 1∂₁v₃julia> (ℝ^3)(∇)1v₁ + 1v₂ + 1v₃
Definition. Define differential $d:\Omega^p V\rightarrow\Omega^{p+1}V$ and co-differential $\delta:\Omega^pV\rightarrow\Omega^{p-1}V$ such that
\[\star d\omega = \star(\nabla\wedge\omega) = \nabla\times\omega, \qquad \omega\cdot\nabla = \omega\vee\star\nabla = \partial\omega =-\delta\omega.\]
Vorticity curl of vector-field: $\star d(dx_1+dx_2+dx_3) = (∂_2 -∂_3)dx_1 + (∂_3 -∂_1)dx_2 + (∂_1 -∂_2)dx_3$.
julia> @basis tangent(ℝ^3,2,3); ⋆d(v1+v2+v3)0 - 1∂₂v₁ + 1∂₃v₁ + 1∂₁v₂ - 1∂₃v₂ - 1∂₁v₃ + 1∂₂v₃
Boundary of 3-simplex, faces of simplex (oriented): $\partial(v_{1234}) = -\partial_4v_{123}+\partial_3v_{124}-\partial_2v_{134}+\partial_1v_{234}$.
julia> ∂(Λ(tangent(ℝ^4,2,4)).v1234)0 - 1∂₄v₁₂₃ + 1∂₃v₁₂₄ - 1∂₂v₁₃₄ + 1∂₁v₂₃₄
These two maps have the special properties $d\circ d=0$ and $\partial\circ\partial = 0$ for any form $\omega$ and vector field $\nabla$. In topology there is boundary operator $\partial$ defined by $\partial\epsilon = \epsilon\cdot\nabla = \sum_k\partial_k\epsilon_k$ and is commonly discussed in terms the limit $\epsilon(x)\cdot\nabla\omega(x) = \lim_{h\rightarrow0} \frac{\omega(x+h\epsilon)-\omega(x)}{h}$, which is the directional derivative.
Theorem (Integration by parts & Stokes). Let $\nabla \in\Omega_1 V$ be a Leibnizian vector field operator, then $d,-\partial$ are Hilbert adjoint Hodge-DeRahm operators with
\[\int_M d\omega\wedge\star\eta +\int_M \omega\wedge\star\partial\eta = 0, \qquad \langle d\omega\ast\eta\rangle =\langle\omega\ast-\partial\eta\rangle.\]
Proof. Recall, $\partial\omega = \omega\cdot\nabla = \star^{-1}(\star\omega\wedge\star^2\nabla) = (-1)^n(-1)^{nk}\star d\star\omega$. Then substitute this into the integral $\int_M \omega\wedge(-1)^{mk+m+1}\star\star d\star\eta = (-1)^{km+m+1}(-1)^{(m-k+1)(k-1)}\int_M\omega\wedge d\star\eta$, and apply the identity $(-1)^{km+m+1}(-1)^{(m-k+1)(k-1)}=(-1)^k$ and $(-1)^k\int_M\omega\wedge d\star\eta = \int_M d(\omega\wedge\star\eta) - (-1)^{k-1}\omega\wedge d\star\eta = \int_M d\omega\wedge\star\eta$. Stokes identity can be proved by relying on a variant of the common factor theorem by Browne.
Theorem (Clifford-Dirac-Laplacian) Dirac operator is $(\nabla^2)^\frac12\omega = \pm\nabla\omega = \pm\nabla\wedge\omega \pm \nabla\cdot\omega = \pm d\omega\pm\partial\omega$.
\[\nabla^2\omega = \nabla\wedge(\omega\cdot\nabla) + (\nabla\wedge\omega)\cdot\nabla) = \mp(\mp\omega\ominus\nabla)\ominus\nabla).\]
Elements $\omega\in\mathcal H^p M = \{\nabla\omega = 0\mid\omega\in \Omega^pM\}$ are harmonic forms if $\nabla\omega = 0$ and hence both closed $d\omega=0$ and coclosed $\delta\omega=0$. Hodge decomposition: $\Omega^pM=\mathcal H^pM\oplus\text{im}(d\Omega^{p-1}M)\oplus\text{im}(\partial\Omega^{p+1}M)$.
Theorem (First grade sandwich product) Reflection by hyperplane $\star\nabla$ has isometry $\omega\oslash = -\nabla\backslash\omega\nabla$.
Proof. Theorem proved by Michael Reed in Grassmann.jl research papers.
Theorem (Cartan-Dieudonne) For every isometry of $V\rightarrow V$, there is a way to express it as composite of at most $k$ reflections across non-singular hyperplanes. Hence there exist vectors $\nabla_j$ such that
\[(((\omega\oslash\nabla_1)\oslash\nabla_2)\oslash\cdots)\oslash\nabla_k = \omega\oslash(\nabla_1\nabla_2\cdots\nabla_k)\]
for any isometry element of the orthogonal group $O(p,q)$.
Note that elements under the transformations of this group preserve inner product relations. The even grade operators make up the rotational group, where each bivector isometry is a composition of two reflections.
Exponential map and Lie group parameter special cases: consider the differential equation $\partial_i\epsilon_j = \epsilon_j\oslash\omega$ with the solution $\epsilon_j(x) = \epsilon_j(0)\oslash e^{x_i\omega}$ where $\theta =2 x_i$ is the parameter of the Lie group. Then for a normalized $\omega$,
\[e^{\theta\omega} = \sum_k \frac{(\theta\omega)^k}{k!} = \begin{cases} \cosh\theta+\omega\sinh\theta, & \text{if } \omega^2 = 1, \\ \cos\theta + \omega\sin\theta, & \text{if } \omega^2=-1, \\ 1+\theta\omega, & \text{if } \omega^2=0. \end{cases}\]
Note that $\nabla\oslash e^{\theta\omega/2} = \nabla \ominus e^{\theta\omega}$ is a double covering when using the complex numbers in the Euclidean plane.
Remark. The sandwich must be written with reversion on the left side, otherwise the rotation is clockwise and opposite of the phase parameter convention used by Euler's formula. For example, observe the resultant direction of rotation
\[e^{\frac\pi4v_{12}}v_1\widetilde{e^{\frac\pi4v_{12}}} = -v_2\]
which means it is rotating in the wrong direction opposite of Euler, while
\[\widetilde{e^{\frac\pi4v_{12}}}v_1e^{\frac\pi4v_{12}} = v_2\]
is compatible with Euler's convention. So, sandwich must be applied with its reversion on the left side–if the standard Euler rotation direction is desired. However, many authors follow the opposite convention of clockwise instead.
AbstractTensors, Grassmann
settled on custom trigonometric identities,
\[\exp(\omega) = \sum_{n=0}^\infty \frac{\omega^n}{n!},\]
\[\log(\omega) = \sum_{n=0}^\infty \frac{2}{2n+1}\left(\frac{\omega-1}{\omega+1}\right)^{2n+1}\]
\[\cosh(\omega) = \sum_{n=0}^\infty \frac{\omega^{2n}}{(2n)!},\]
\[\sinh(\omega) = \sum_{n=0}^\infty \frac{\omega^{2n+1}}{(2n+1)!},\]
\[\cos(\omega) = \cosh(I\omega),\]
\[\sin(\omega) = \sinh(I\omega)/I,\]
\[\tan(\omega) = \frac{\sin(\omega)}{\cos(\omega)},\]
\[\cot(\omega) = \frac{\cos(\omega)}{\sin(\omega)},\]
\[\sec(\omega) = \frac{1}{\cos(\omega)},\]
\[\csc(\omega) = \frac{1}{\sin(\omega)},\]
\[\text{asec}(\omega) = \text{acos}(\omega^{-1}),\]
\[\text{acsc}(\omega) = \text{asin}(\omega^{-1}),\]
\[\text{sech}(\omega) = \frac{1}{\cosh(\omega)},\]
\[\text{csch}(\omega) = \frac{1}{\sinh(\omega)},\]
\[\text{asech}(\omega) = \text{acosh}(\omega^{-1}),\]
\[\text{acsch}(\omega) = \text{asinh}(\omega^{-1}),\]
\[\tanh(\omega) = \frac{\sinh(\omega)}{\cosh(\omega)},\]
\[\coth(\omega) = \frac{\cosh(\omega)}{\sinh(\omega)},\]
\[\text{asinh}(\omega) = \log\left(\omega + \sqrt{\omega^2+1}\right),\]
\[\text{acosh}(\omega) = \log\left(\omega + \sqrt{\omega^2-1}\right),\]
\[\text{atanh}(\omega) = \frac{\log(1+\omega)-\log(1-\omega)}{2},\]
\[\text{acoth}(\omega) = \frac{\log(\omega+1)-\log(\omega-1)}{2},\]
\[\text{asin}(\omega) = -I\log\left(I\omega + \sqrt{1-\omega^2}\right),\]
\[\text{acos}(\omega) = -I\log\left(\omega + I\sqrt{1-\omega^2}\right),\]
\[\text{atan}(\omega) = -I\text{atanh}(I\omega),\]
\[\text{acot}(\omega) = {\textstyle-I\frac{\log(\omega-I)-\log(\omega+I)}{2}}.\]
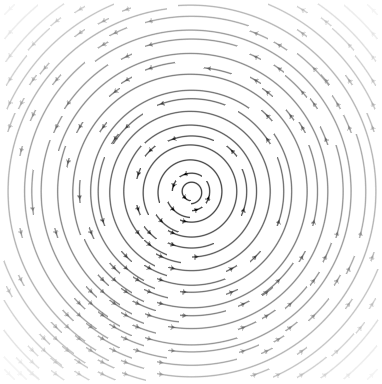
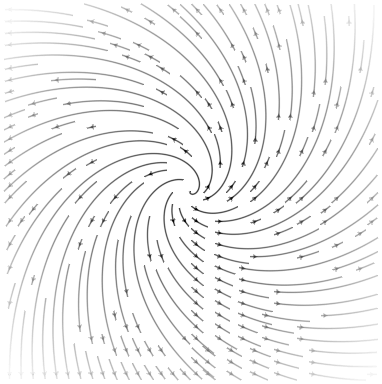
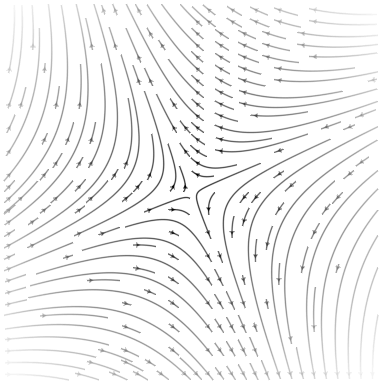
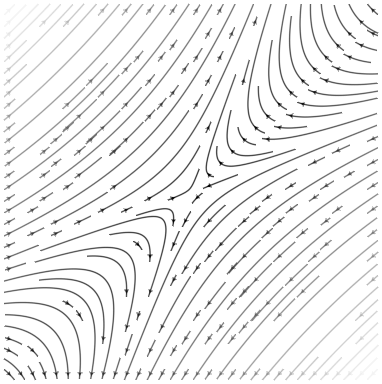
Due to GeometryTypes.jl
Point interoperability, plotting and
visualizing with Makie.jl is
easily possible. For example, the vectorfield
method creates an anonymous Point function
that applies a versor outermorphism:
using Grassmann, Makie
basis"2" # Euclidean
streamplot(vectorfield(exp(π*v12/2)),-1.5..1.5,-1.5..1.5)
streamplot(vectorfield(exp((π/2)*v12/2)),-1.5..1.5,-1.5..1.5)
streamplot(vectorfield(exp((π/4)*v12/2)),-1.5..1.5,-1.5..1.5)
streamplot(vectorfield(v1*exp((π/4)*v12/2)),-1.5..1.5,-1.5..1.5)
@basis S"+-" # Hyperbolic
streamplot(vectorfield(exp((π/8)*v12/2)),-1.5..1.5,-1.5..1.5)
streamplot(vectorfield(v1*exp((π/4)*v12/2)),-1.5..1.5,-1.5..1.5)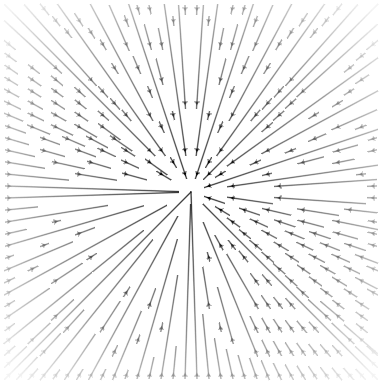

using Grassmann, Makie
@basis S"∞+++"
f(t) = (↓(exp(π*t*((3/7)*v12+v∞3))>>>↑(v1+v2+v3)))
lines(V(2,3,4).(points(f)))
@basis S"∞∅+++"
f(t) = (↓(exp(π*t*((3/7)*v12+v∞3))>>>↑(v1+v2+v3)))
lines(V(3,4,5).(points(f)))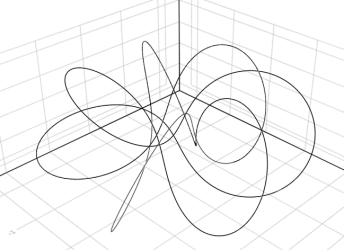
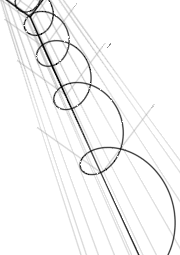
using Grassmann, Makie; @basis S"∞+++"
streamplot(vectorfield(exp((π/4)*(v12+v∞3)),V(2,3,4)),-1.5..1.5,-1.5..1.5,-1.5..1.5,gridsize=(10,10))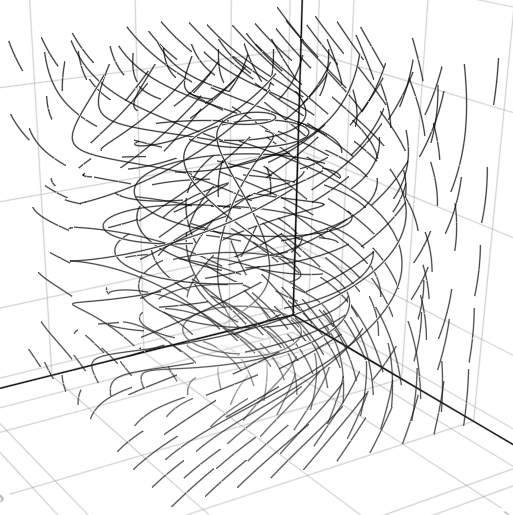
using Grassmann, Makie; @basis S"∞+++"
streamplot(vectorfield(exp((π/4)*(v12+v∞3)),V(2,3,4),V(1,2,3)),-1.5..1.5,-1.5..1.5,-1.5..1.5,gridsize=(10,10))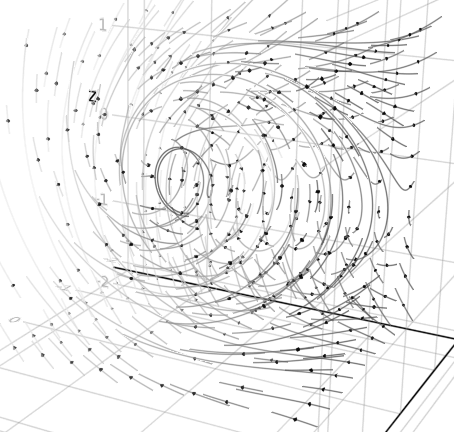
using Grassmann, Makie; @basis S"∞+++"
f(t) = ↓(exp(t*v∞*(sin(3t)*3v1+cos(2t)*7v2-sin(5t)*4v3)/2)>>>↑(v1+v2-v3))
lines(V(2,3,4).(points(f)))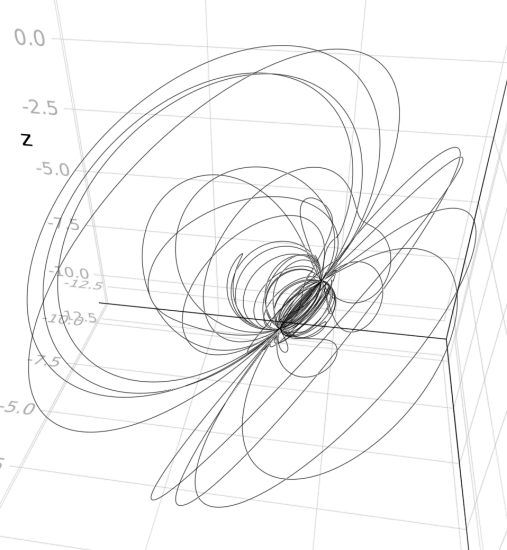
using Grassmann, Makie; @basis S"∞+++"
f(t) = ↓(exp(t*(v12+0.07v∞*(sin(3t)*3v1+cos(2t)*7v2-sin(5t)*4v3)/2))>>>↑(v1+v2-v3))
lines(V(2,3,4).(points(f)))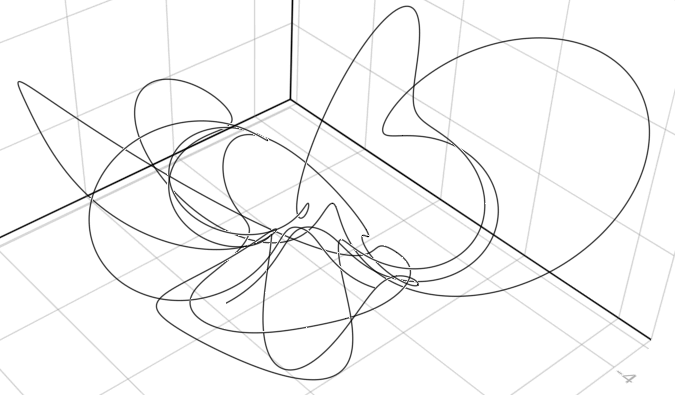
As a result of Grassmann's exterior & interior products, the Hodge-DeRahm chain complex from cohomology theory is
\[0 \,\underset{\partial}{\overset{d}{\rightleftarrows}}\, \Omega^0(M) \,\underset{\partial}{\overset{d}{\rightleftarrows}}\, \Omega^1(M) \,\underset{\partial}{\overset{d}{\rightleftarrows}}\, \cdots \,\underset{\partial}{\overset{d}{\rightleftarrows}}\, \Omega^n(M) \,\underset{\partial}{\overset{d}{\rightleftarrows}}\, 0,\]
having dimensional equivalence brought by the Grassmann-Hodge complement,
\[\mathcal H^{n-p}M \cong \frac{\text{ker}(d\Omega^{n-p}M)}{\text{im}(d\Omega^{n-p+1}M)}, \qquad \dim\mathcal H^pM = \dim\frac{\text{ker}(\partial\Omega^pM)}{\text{im}(\partial\Omega^{p+1}M)}.\]
The rank of the grade $p$ boundary incidence operator is
\[\text{rank}\langle\partial\langle M\rangle_{p+1}\rangle_p = \min\{\dim\langle\partial\langle M\rangle_{p+1}\rangle_p,\dim\langle M\rangle_{p+1}\}.\]
Invariant topological information can be computed using the rank of homology,
\[b_p(M) = \dim\langle M\rangle_{p+1} - \text{rank}\langle\partial\langle M\rangle_{p+1}\rangle_p - \text{rank}\langle\partial\langle M\rangle_{p+2}\rangle_{p+1}\]
are the Betti numbers with Euler characteristic $\chi(M) = \sum_p (-1)^pb_p$.
Let's obtain the full skeleton of a
simplical complex $\Delta(\omega)=\mathcal
P(\omega)\backslash\Lambda^0(V)$ from the power set
$\mathcal P(\omega)$ of all vertices with each
subcomplex
$\Delta(\partial(\omega))$ contained in the
edge graph:
\[\Delta(\omega) = \sum_{g=1}^n\sum_{k=1}^{n\choose g}\left(\text{abs}\langle\omega\rangle_{g,k} + \Delta\left(\text{abs}\,\partial\langle\omega\rangle_{g,k}\right)\right).\]
Compute the value $\chi(\Delta(\omega))=1$
and $\chi(\Delta(\partial(\omega))) = \, ?$
for any simplex $\omega$. As an exercise, also
compute the corresponding betti numbers..
julia> [(χ(Δ(ω)),χ(Δ(∂(ω)))) for ω ∈ (Λ(ℝ5).v12,Λ(ℝ5).v123,Λ(ℝ5).v1234,Λ(ℝ5).v12345)]ERROR: MethodError: objects of type Laplacian are not callable The object of type `Laplacian` exists, but no method is defined for this combination of argument types when trying to treat it as a callable object.
These methods can be applied to any
Multivector simplicial complex.
Null-basis of the projective split
Let $v_\pm^2 = \pm1$ be a basis with $v_\infty = v_++v_-$ and $v_\emptyset = (v_--v_+)/2$. An embedding space $\mathbb R^{p+1,q+1}$ carrying the action from the group $O(p+1,q+1)$ then has $v_\infty^2 =0$, $v_\emptyset^2 =0$, $v_\infty \cdot v_\emptyset = -1$, and $v_{\infty\emptyset}^2 = 1$ with Lobachevskian plane $v_{\infty\emptyset}$ having these product properties,
julia> using Grassmann; @basis S"∞∅++"(⟨∞∅11⟩, v, v∞, v∅, v₁, v₂, v∞∅, v∞₁, v∞₂, v∅₁, v∅₂, v₁₂, v∞∅₁, v∞∅₂, v∞₁₂, v∅₁₂, v∞∅₁₂)julia> v∞^2, v∅^2, v1^2, v2^2(𝟎, 𝟎, 1v, 1v)julia> v∞ ⋅ v∅, v∞∅^2(-1v, 1v)julia> v∞∅ * v∞, v∞∅ * v∅(-1v∞, 1v∅)julia> v∞ * v∅, v∅ * v∞(-1 + 1v∞∅ + 0v∞₁ + 0v∞₂ + 0v∅₁ + 0v∅₂ + 0v₁₂ + 0v∞∅₁₂, -1 - 1v∞∅ + 0v∞₁ + 0v∞₂ + 0v∅₁ + 0v∅₂ + 0v₁₂ + 0v∞∅₁₂)
For the null-basis, complement operations are different:
\[\star v_\infty = \star(v_++v_-) = (v_- + v_+)v_{1...n} = v_{\infty1...n}\]
\[ \star 2v_\emptyset = \star(v_--v_+) = (v_+ - v_-)v_{1...n} = -2v_{\emptyset1...n}\]
The Hodge complement satisfies
$\langle\omega\ast\omega\rangle
I=\omega\wedge\star\omega$. This property is
naturally a result of using the geometric product in the
definition. An additional metric independent version of the
complement operation is available with the !
operator,
\[!v_\infty = !(v_++v_-) = (v_- - v_+)v_{1...n} = 2v_{\emptyset1...n}\]
\[!2v_\emptyset = !(v_--v_+) = (v_+ + v_-)v_{1...n} = -v_{\infty1...n}\]
For that variation of complement, $||\omega||^2 I = \omega\,\wedge\,!\omega$ holds.
julia> ⋆v∞, !v∞, ⋆v∅, !v∅(1v∞₁₂, 2v∅₁₂, -1v∅₁₂, -0.5v∞₁₂)julia> !v∞ * v12 == -2v∅, !v∅ * v12 == v∞/2(true, true)julia> ⋆v∞ * v12 == -v∞, ⋆v∅ * v12 == v∅(true, true)julia> v∞ * !v∞, v∅ * !v∅(0 + 0v∞∅ + 0v∞₁ + 0v∞₂ + 0v∅₁ + 0v∅₂ - 2v₁₂ + 2v∞∅₁₂, -0.0 - 0.0v∞∅ - 0.0v∞₁ - 0.0v∞₂ - 0.0v∅₁ - 0.0v∅₂ + 0.5v₁₂ + 0.5v∞∅₁₂)
Extended tangent algebra basis
Definition (Symmetric Leibniz differentials): Let $\partial_k = \frac\partial{\partial x_k}\in L_gV\,$ be Leibnizian symmetric tensors, then there is an equivalence relation $\asymp$ which holds for each $\sigma\in S_p$
\[(\partial_p \circ \dots\circ \partial_1)\omega \asymp(\bigotimes_k \partial_{\sigma(k)})\omega \iff \ominus_k\partial_k = \bigodot_k\partial_k,\]
along with each derivation $\partial_k(\omega\eta) = \partial_k(\omega)\eta + \omega\partial_k(\eta)$.
The product rule is encoded into Grassmann
algebra when a tangent bundle is used,
demonstrated here symbolically with Reduce by
using the dual number definition:
julia> using Grassmann, Reduce
Reduce (Free CSL version, revision 4590), 11-May-18 ...
julia> @mixedbasis tangent(ℝ^1)
(⟨+-₁¹⟩*, v, v₁, w¹, ϵ₁, ∂¹, v₁w¹, v₁ϵ₁, v₁∂¹, w¹ϵ₁, w¹∂¹, ϵ₁∂¹, v₁w¹ϵ₁, v₁w¹∂¹, v₁ϵ₁∂¹, w¹ϵ₁∂¹, v₁w¹ϵ₁∂¹)
julia> a,b = :x*v1 + :dx*ϵ1, :y*v1 + :dy*ϵ1
(xv₁ + dxϵ₁, yv₁ + dyϵ₁)
julia> a * b
x * y + (dy * x + dx * y)v₁ϵ₁Higher order and multivariable Taylor numbers are also supported.
julia> @basis tangent(ℝ,2,2) # 1D Grade, 2nd Order, 2 Variables(T²⟨+₁₂⟩, v, v₁, ∂₁, ∂₂, ∂₁v₁, ∂₂v₁, ∂₁₂, ∂₁₂v₁)julia> ∂1 * ∂1v1∂₁⊗∂₁v₁julia> ∂1 * ∂2∂₁₂julia> v1*∂12∂₁₂v₁julia> ∂12*∂2 # 3rd order is zero𝟎julia> @mixedbasis tangent(ℝ^2,2,2); # 2D Grade, 2nd Order, 2 Variablesjulia> V(∇) # vector field0v₁₂ + 1∂₁v₁ + 0∂₂v₁ + 0∂₁v₂ + 1∂₂v₂ + 0∂₁₂julia> V(∇) ⋅ V(∇) # Laplacian0 + 1∂₁⊗∂₁ + 1∂₂⊗∂₂julia> ans*∂1 # 3rd order is zero0.0v⃖
Multiplication with an $\epsilon_i$ element
is used help signify tensor fields so that differential
operators are automatically applied in the
Submanifold algebra as ∂ⱼ⊖(ω⊗ϵᵢ) = ∂ⱼ(ωϵᵢ) ≠
(∂ⱼ⊗ω)⊖ϵᵢ.
julia> using Reduce, Grassmann; @mixedbasis tangent(ℝ^2,3,2);
julia> (∂1+∂12) * (:(x1^2*x2^2)*ϵ1 + :(sin(x1))*ϵ2)
0.0 + (2 * x1 * x2 ^ 2)∂₁ϵ¹ + (cos(x1))∂₁ϵ² + (4 * x1 * x2)∂₁₂ϵ¹Although fully generalized, the implementation in this release is still experimental.
Symbolic coefficients by declaring algebra
Due to the abstract generality of the code generation of
the Grassmann product algebra, it is easily
possible to extend the entire set of operations to other
kinds of scalar coefficient types.
julia> using GaloisFields, Grassmann
julia> const F = GaloisField(7)
𝔽₇
julia> basis"2"
(⟨++⟩, v, v₁, v₂, v₁₂)
julia> F(3)*v1
3v₁
julia> inv(ans)
5v₁By default, the coefficients are required to be
<:Number. However, if this does not suit
your needs, alternative scalar product algebras can be
specified with
Grassmann.generate_algebra(:AbstractAlgebra,:SetElem)where :SetElem is the desired scalar field
and :AbstractAlgebra is the scope which
contains the scalar field.
With the usage of Requires, symbolic scalar
computation with Reduce.jl and
other packages is automatically enabled,
julia> using Reduce, Grassmann
Reduce (Free CSL version, revision 4590), 11-May-18 ...
julia> basis"2"
(⟨++⟩, v, v₁, v₂, v₁₂)
julia> (:a*v1 + :b*v2) ⋅ (:c*v1 + :d*v2)
(a * c + b * d)v
julia> (:a*v1 + :b*v2) ∧ (:c*v1 + :d*v2)
0.0 + (a * d - b * c)v₁₂
julia> (:a*v1 + :b*v2) * (:c*v1 + :d*v2)
a * c + b * d + (a * d - b * c)v₁₂If these compatibility steps are followed, then
Grassmann will automatically declare the
product algebra to use the Reduce.Algebra
symbolic field operation scope.
julia> using Reduce,Grassmann; basis"4"
Reduce (Free CSL version, revision 4590), 11-May-18 ...
(⟨++++⟩, v, v₁, v₂, v₃, v₄, v₁₂, v₁₃, v₁₄, v₂₃, v₂₄, v₃₄, v₁₂₃, v₁₂₄, v₁₃₄, v₂₃₄, v₁₂₃₄)
julia> P,Q = :px*v1 + :py*v2 + :pz* v3 + v4, :qx*v1 + :qy*v2 + :qz*v3 + v4
(pxv₁ + pyv₂ + pzv₃ + 1.0v₄, qxv₁ + qyv₂ + qzv₃ + 1.0v₄)
julia> P∧Q
0.0 + (px * qy - py * qx)v₁₂ + (px * qz - pz * qx)v₁₃ + (px - qx)v₁₄ + (py * qz - pz * qy)v₂₃ + (py - qy)v₂₄ + (pz - qz)v₃₄
julia> R = :rx*v1 + :ry*v2 + :rz*v3 + v4
rxv₁ + ryv₂ + rzv₃ + 1.0v₄
julia> P∧Q∧R
0.0 + ((px * qy - py * qx) * rz - ((px * qz - pz * qx) * ry - (py * qz - pz * qy) * rx))v₁₂₃ + (((px * qy - py * qx) + (py - qy) * rx) - (px - qx) * ry)v₁₂₄ + (((px * qz - pz * qx) + (pz - qz) * rx) - (px - qx) * rz)v₁₃₄ + (((py * qz - pz * qy) + (pz - qz) * ry) - (py - qy) * rz)v₂₃₄It should be straight-forward to easily substitute any other extended algebraic operations and fields; issues with questions or pull-requests to that end are welcome.